国家知识产权局专利局专利审查协作广东中心
摘要:外骨骼机器人是一种结合了人的智能和机器人机械能量的人机结合可穿戴装备,具有增强人体机能和辅助康复训练的功能。近年来,偏瘫患者的日益增多造成康复需求与康复治疗之间的巨大供需矛盾,使康复机器人成为机器人研究领域的一个热点。本文以外骨骼康复机器人的专利申请作为分析对象,重点分析全球及中国范围内关于外骨骼康复机器人的重要申请人及其核心专利等信息。
关键词:外骨骼机器人;主被动康复训练;专利分析;申请人。
外骨骼原指为生物提供保护和支持的坚硬的外部结构,外骨骼机器人可理解为一种结合了人的智能和机器人机械能量的人机结合可穿戴装备。在医疗领域,外骨骼机器人可以用于辅助残疾人、老年人及下肢肌无力患者行走,也可以帮助他们进行强迫性康复运动等。外骨骼机器人是进入 21 世纪后国际机器人理论与技术领域的研究热点之一,涉及到机构仿生设计,运动学和动力学,先进机电自动控制系统,高密度低噪声低振动驱动系统,传感器信息学和人机工程学等多学科交叉,是一个国家高端机器人理论与技术的必争点和体现。
本文选择DWPI/SIPOABS/CNABS专利数据库,通过对检索所获得的该领域的专利申请进行统计与分析研究,对外骨骼康复机器人主要涉及的国内、外申请人进行分析。
1、国外重要申请人分析
目前,外骨骼康复机器人的重要技术主要集中在美国,日本和欧洲西方强国。
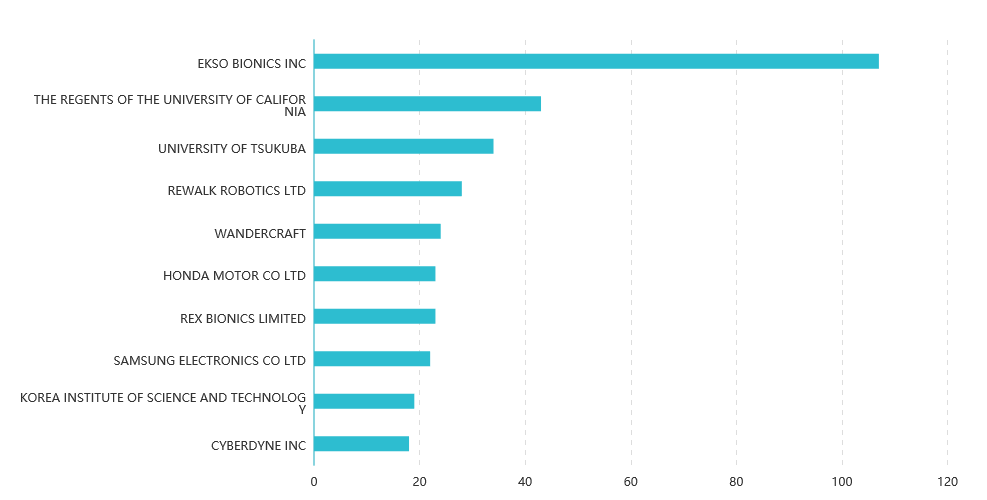
图1国外申请人排名
(1)美国EKSO仿生公司(原伯克利仿生公司)及加州大学:伯克利仿生技术公司申请的专利US2009292369 A1描述了一种外骨骼设备,如图2(a)所示,其允许穿用者在行走和携带重物的同时减少能量消耗1。其随后于2010 年发布了康复外骨骼机器人eLEGS,它可以让下肢麻痹患者和不能正常步行的病人站立和步行,是目前为止最为杰出的康复外骨骼机器人之一。
(2)日本筑波大学:筑波大学申请的专利JP2005095561 A描述了一种可穿戴动作辅助装置2,它的传感器系统包括角度传感器、肌电信号传感器和足底力传感器等,能基于人体信号反馈和预测进行控制,如图2(b)所示。其研发的HAL-5运动辅助外骨骼更是被《时代》杂志评为2005年世界十大发明。
(3)以色列ReWalk机器人公司(原Argo医疗科技公司):该公司申请的专利EP1260201A1公开了一种用于残疾人的步行辅助装置3,其可以帮助下身瘫痪者站立、行走、爬楼梯,如图 2(c)所示。ReWalk公司研发的康复下肢外骨骼“ReWalk”同样非常具有代表性,其由身体感应器、电动腿部支架和一个背包组成,并需要一副拐杖来帮助维持身体平衡。
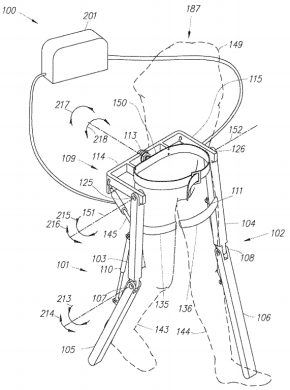
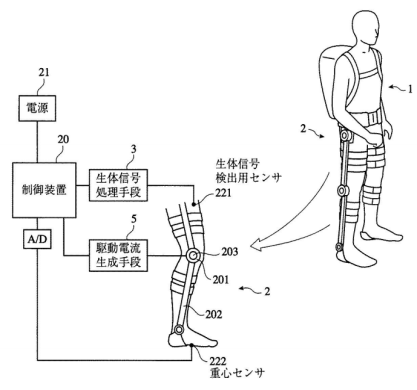
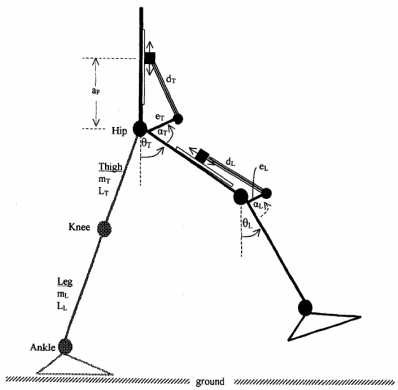
(a)EKSO公司的外骨骼专利;(b)筑波大学的外骨骼专利;(c)ReWalk公司的外骨骼专利
图2 国外重要申请人专利
2、中国重要申请人分析
中国在外骨骼机器人研究领域属于后起之秀,但已获得了越来越多的重视,众多高校研究院也对外骨骼做了各方面的研究,并取得了巨大的进展。
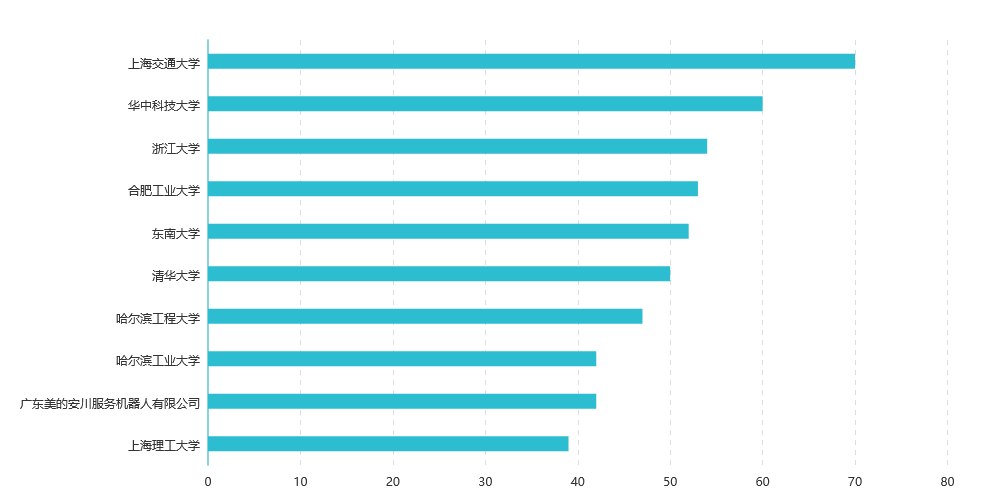
图3 国内申请人排名
(1)上海交通大学:上海交通大学申请的专利CN102499859A描述了一种下肢外骨骼康复机器人用于帮助截瘫患者实现站立并行走,通过采集拐杖与地面的接触信息来控制膝关节和髋关节的屈伸运动,从而帮助患者实现跨步,踝关节的对拉弹簧可以帮助减少来自地面的冲击,有益于患者舒适行走。
(2)华中科技大学:华中科技大学的专利CN101125112A中记载了一种可穿戴式上肢康复训练机器人装置,该装置有8个自由度,用来模拟人的上肢关节自由度,康复训练中能够提供较多的活动度,使人体上肢的主要关节都能得到辅助训练。
(3)浙江大学:浙江大学申请的专利CN103932870A研制了一种仿生设计下肢康复训练外骨骼,其中下肢外骨骼髋关节三个自由度轴线正交于人体髋关节运动中心;膝关节屈伸机构的转动中心与人体膝关节转动中心始终保持同轴线,避免产生人机干涉力,使整个康复训练更加仿生。
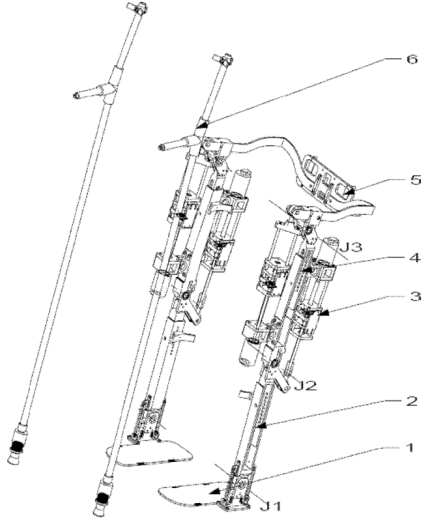
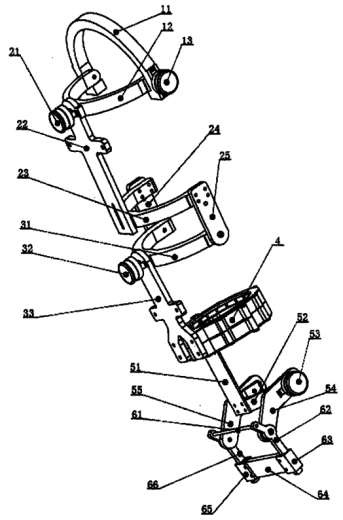
(a)上海交通大学的外骨骼专利 (b)华中科技大学的外骨骼专利 (c)浙江大学的外骨骼专利
图3 国内重要申请人专利
相较于国际上对外骨骼康复机器人的广泛研究,我国在这方面还处于刚刚起步阶段,很多关键技术的研发,如外骨骼机构构型设计,高密度驱动系统,先进机电控制系统等,还处于初级阶段。这些关键技术的突破,将会极大地提升我国外骨骼机器人基础理论技术的研究水平,迈入国际先进行列,同时也是对步行机器人研究领域的一大贡献。
参考文献:
[1] US2009292369 A1,”Device and method for decreasing energy consumption of a person by use of a lower extremity exoskeleton”, BERKELEY BIONICS
[2] JP2005095561 A, ”装着式動作補助装置、装着式動作補助装置の制御方法および制御用プログラム”, UNIV TSUKUB
[3] EP1260201A1,” Gait-locomotor apparatus”, ARGO MEDICAL TECHNOLOGIES LTD
[4] CN102499859A,“下肢外骨骼行走康复机器人”,上海交通大学
[5] CN101125112A,“一种可穿戴式上肢康复训练机器人装置”,华中科技大学
[6] CN103932870A,“仿生设计下肢康复训练外骨骼”,浙江大学

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网 琼ICP备2021005105号