1. 国网上海松江供电公司 201600
2.上海申能临港燃机发电有限公司 201306
摘要:本文对已有文献进行研究后,设计了一种具有较高容错率的多信息融合方法,可用于广域保护的故障元件识别,主要是根据电网结构形成故障识别码,将常规主/后备保护的动作信息和断路器位置进行综合利用,构建适应度函数和状态期望函数,实现故障点定位。
关键词:广域继电保护;容错性;信息融合;故障定位
基于多信息融合的广域继电保护新算法,通过将主保护、后备保护等等各种信息量综合考量建立适应度函数,通过状态期望值来进行故障点的定位,在容错方面有了较大的提高[3]。考虑到广域信息在测量、判断和传输过程中可能出现的信息缺失或信息错误,通过建立多信息融合的适应度函数模型,利用信息的冗余性和相互间的逻辑关系反映区域内输电系统各元件的故障识别值。
本文在MATLAB\SIMULINK平台中搭建如图1所示模型,首先对模型中可能故障点(母线、线路)进行如表1所示:
表1 故障点编号
| 故障点 | B1 | L1 | B2 | L2 | B3 | L3 | B4 | L4 | B5 |
| 编号 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 |
其中B1、B2、B3、B4、B5为母线,在母线B2、B4上分别挂有负载S1、S2,L1、L2、L3、L4为输电线路,为了简化模型,仿真中全部忽略线路的对地电容,以阻感形式模拟。
图1 MATLAB\SIMULINK仿真电网拓扑结构
基于文献中所提,在网络中插入8个IED(智能电子设备)[4],如图1所示。因为IED1与IED8都是位于母线单侧,而母线另一侧是发电机并非输电线路,所以并没有加装零序、负序保护。而对于IED2、IED7来说,因为除本段线路以外不存在相邻下一条线路,所以没有加装距离三段保护,但是它们位于母线B2、B4的一侧需要进行方向识别,故加装了零序、负序保护。
考虑系统故障时基于不同保护原理的保护动作信息和动作灵敏度均不同,如果同等看待则无法体现主要保护信息的重要性。通过引入保护动作系数(AF值)[2],不仅区分主保护后备保护动作信息同时考虑了主保护与后备保护之间的逻辑关系及保护范围。保护动作系数具体值如表2所示。
表2 保护动作系数表
| 主保护 | 距离I段 | 距离II段 | 零序、负序 | 距离III段 | 失灵保护 | |
| AF值 | 6 | 6 | 3 | 2 | 2 | 6 |
因为对于同一个故障,故障周围的IED中的不同类型的保护可能会有相应的动作,而其中的主次分别却不能等同对待,而动作保护系数就如同一个加权系数一样,而该算法容错的特性恰恰就是利用了这里。
 (1)
(1)
式1中E(X)为故障识别编码所对应的适应度;Aj和Aj*分别为各变电站IED配置的主保护的实际状态和期望状态(0表示正常1表示故障状态);Bj和Bj*分别为各变电站IED配置的距离I段、突变量距离等不能保护线路全长但可直接判断保护对象故障的保护的实际状态和期望状态;Cj和Cj*分别为各变电站IED配置的距离II段等能保护线路全长但不能直接判断保护对象故障的保护的实际状态和期望状态;Dj和Dj*分别为各变电站IED配置的零序负序等具有正反方向判断的保护的实际状态和期望状态;Ej和Ej*分别为各变电站IED配置的距离III段等远后备保护的实际状态和期望状态;Fj和Fj*分别为各变电站IED配置的失灵保护的实际状态和期望状态;NA、NB、NC、ND、NE、NF分别为保护总数目ωA、ωB、ωC、ωD、ωE、ωF分别为保护动作系数[1]。
当网络结构一定的时候,对于线路中任何一种故障,IED中各种保护的动作状态都是可以事先预知的,所以将各种故障情况下IED中保护动作状态记录下来存入专家系统中,即适应函数中的A
j*、Bj*、Cj*、Dj*、Ej*、Fj*。当故障发生后IED实际返回的值再与专家系统中值比较,构成适应度函数。通过观察可以发现,当某种故障发生后,实际返回的一系列动作状态愈接近专家系统中的值,则算出的E(X)值愈接近于0。表3为在没有发生故障的时候期望值。
表3 正常情况下的期望值
| 故障2 | 故障3 | 故障4 | 故障5 | 故障6 | 故障7 | 故障8 | 故障9 | ||
| 2 | 19 | 7 | 36 | 14 | 36 | 10 | 19 | 2 |
由此可以引入故障识别值的概念,令
![]() (2)
(2)
式2中,ESi为正常运行时即没有故障时各故障对应的适应度,Ei为某个故障发生后各故障对应的适应度,Ki为故障识别值。显然某种故障所对应的故障识别值越大,则发生该故障的可能性越大。
仿真时间长度设置为0.1s。在0.0s到0.02s是电源电压爬升阶段。故障设置在0.04s,在L1线路中设置三相短路,即故障编号为2,设置采集IED数据时间为0.89s。L1线路上的相电压的波形,0.0s到0.04s是正常运行,0.04s时故障发生,相电压突降为0V直至切断该线路。
表4为故障识别值,可以发现故障识别码为2的故障识别值是最大的,所以可以断定发生了2号故障。
表4 故障识别值Ki
| 故障1 | 故障2 | 故障3 | 故障4 | 故障5 | 故障6 | 故障7 | 故障8 | 故障9 | |
| Ki | -7.5000 | 1.0000 | -1.5714 | -0.3056 | -1.0714 | -0.5278 | -1.9000 | -1.0000 | -9.5000 |
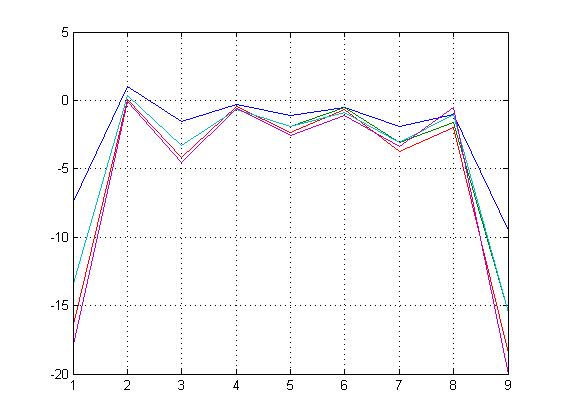
图2 加入错误信息后故障识别值
为了验证其容错的特性,在程序中对IED的采集结果进行了4次随机更改,每次更改5个数据,然后进行判别计算故障识别值如图2。可以发现故障2的故障识别值依然是最高,能明确指出故障位置。由此也体现出其容错性。
通过仿真实验可以验证出该算法可以在网络中准确定位出故障发生的位置,并且当IED传回的数据发生错误产生误码的时候也能够正确地指示出故障发生的位置。而且在本课程设计的仿真中,通过该算法的故障识别然后进行闭环跳闸,将继电保护的一次侧、二次侧的保护动作情况全部在仿真中得以实现。并且基本上实现了广域继电保护的信息采集、处理、故障辨识、反馈跳闸一整套流程。
参考文献:
[1]谢秋明.电力继电保护装置及故障诊断[J].电子技术与软件工程.2018,(10):236.
[2]张岩,文福拴,熊文,牛振勇,赵宏伟,尚慧玉.基于广域测量信息的电力系统故障诊断解析模型[J].电力建设.2018,(5):10-20.
[3]李振兴,尹项根,张哲等.基于多信息融合的广域继电保护新算法[J]. 电力系统自动化. 2011(09)
[4]姜晨,纪礼君.浅谈变电站IED数据在继电保护中的应用[J].四川电力技术.2018,(2):76-81.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网 琼ICP备2021005105号