中广核新能源(深圳)有限责任公司新疆分公司
摘要:变桨电机作为风机中风能转换电能的关键部件,在风机中起着不可或缺作用,变桨电机电磁刹车作为整个变桨系统中唯一制动元器件,随着机组运行时间不断加长,风力发电机组元器件受机组运行时间、温度、疲劳等各种因素导致机组频繁报出各种故障,本文结合新疆中广核托克逊克尔碱风电场A23风机报出2#变桨位置偏差大故障实例,对造成电磁刹车不动作的各种可能进行分析和总结。
机组配置:GW66/1500KW 国产 Freqcon变流 VENSYS变桨
故障时间:2019年6月13日
故障机组:A23机组
故障风速:20.51M/s
2019年6月13日,风速20.51M/s ,A23机组报出变桨安全链故障、2号叶变桨位置偏差大故障,从中央监控上看2号桨叶未收回,叶片位置卡在20°,无法通过就地监控复位。
每个叶片的变桨控制柜,都配备一套由超级电容组成的备用电源,超级电容储备的能量,在保证变桨控制柜内部电路正常工作的前提下,足以使叶片以7°/s的速率,从0°顺桨到90°三次。当来自滑环的电网电压掉电时,备用电源直接给变桨控制系统供电,仍可保证整套变桨电控系统正常工作。当超级电容电压低于软件设定值时,主控在控制风机停机的同时,还会报出电网电压低故障。相比密封铅酸蓄电池作为备用电源的变桨系统,采用超级电容的变桨系统具有下列优点: a) 充电电流大,充电时间短; b) 交流变直流的整流模块同时作为充电器,无须再单独配置充放电管理电路; c) 寿命长; d) 维护简单; e) 体积小,重量轻。
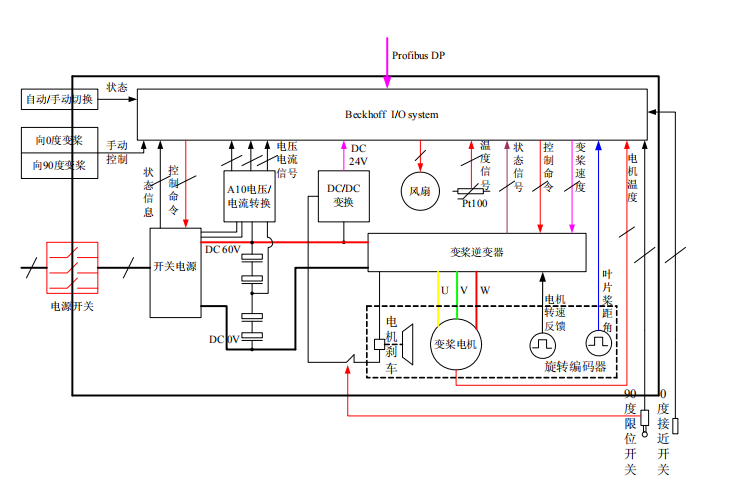
图一 金风 1.5MW 机组变桨驱动原理图
变桨电控系统主电路采用交流-直流-交流,其主体结构为:充电器-超级电容-变桨变频器- 变桨电机。当与主控的通信中断时,变桨控制器能独立地控制叶片顺桨,每个叶片都有独立的变桨空置柜,变桨系统是风力发电机组的重要组成部分,主要功能是通过对叶片节距角的控制,实现最大风能 捕获以及恒速运行。变桨系统还是风力发电机组的主刹车系统,电动变桨系统可以使每个桨叶独立地调整角度。
变桨系统经变桨电机拖动齿形带进行变桨动作,由于没有像偏航系统一样的液压制动系统,唯一的制动方法便是电磁刹车制动。制动系统包括:AC2,电磁刹车,K2继电器。其中柜体内部的接线通过X6哈丁头与变桨电机进行连接。电机主要参数
| 种类 | 额定功率 | 最大转矩 | 制动转矩 | 额定电压 | 额定电流 | 额定功率因素 |
| IM3001 三项异步电机 | 4.5KW | 75NM | 100NM | 29V | 125A | 0.89 |
电磁刹车制动原理:PLC通过计算检测到叶片需要进行变桨时,向变桨系统下发变桨命令,AC2接收到变桨命令后向K2输送24vdc使触点吸合,得电后磁刹车线圈产生磁场吸引衔铁动作,使衔铁和制动盘分离。线圈失电后衔铁失去磁场,在电磁刹车内部弹簧的作用下电磁刹车衔铁被释放,与制动盘紧密贴合产生摩擦实现制动功能。
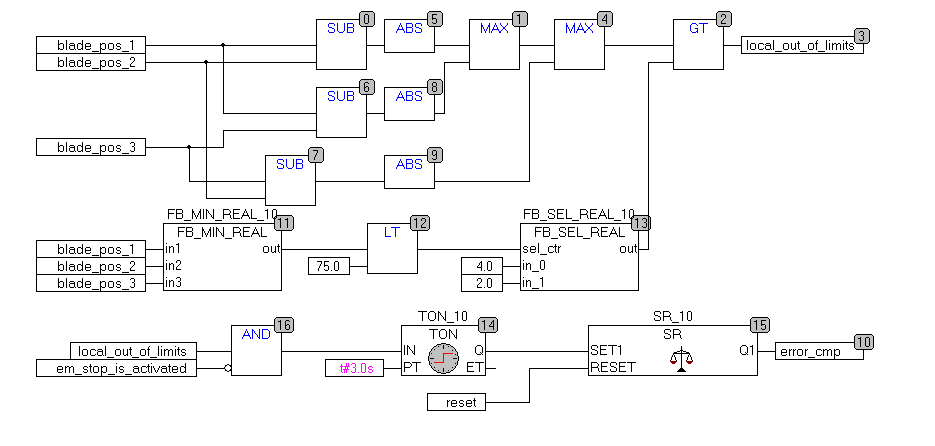
程序上故障的判断条件1:3 个变桨位置最小值小于75°时,3个变桨位置差值绝对值中的最大值大于2,且机组没有激活急停模式时,持续3s,机组报此故障,执行紧急停机。2、3个变桨位置最小值不小于75°时,3 个变桨位置绝对值差大于4,且机组没有激活急停模式,持续3s,机组报此故障,执行紧急停机。
图二

图三
![]()
图四
![]()
图五
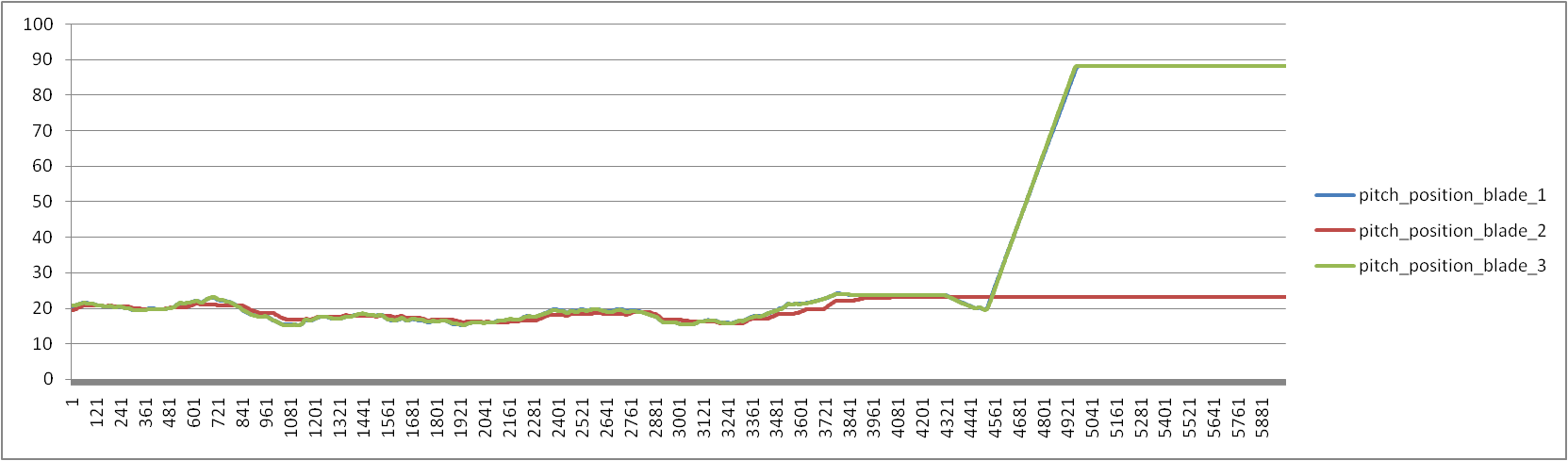
图二 我们可看出叶片角度大于了4°报此故障。从图中可以看出在4321的位置2号桨叶和其他两个桨叶出现明显不同步情况,符合程序逻辑判定条件1。
图三 机组报故障时2#叶片角度在23.16度,1#和3#叶片角度均在19度,故障时刻叶片最大角度和最小角度相差4度符合故障判断条件1;
图四 可看出电机在报故障时刻的3个变桨电机实际变桨速度,其中1 号3号电机速度均高于2号电机速度;
图五 2#变桨电机温度明显高于其它两个电机温度,从这可判断机组在执行收桨时2#变桨电机电磁刹车未松闸导致电机在抱闸的情况下强行让变桨电机收桨,这就导致了变桨电机温度高。
七、变桨动作过程
PLC经过计算检测变桨系统需要进行动作时,向变桨系统发出命令,通过AC2向K2输送24V电压,线圈得电触点吸合电磁刹车导通,衔铁产生磁场与制动盘分离,电磁刹车松闸,变桨电机通过减速器增大输出扭矩,经驱动轮带动齿形带进行变桨动作。当K2线圈失电,衔铁失去磁场吸引后落下与制动盘紧密贴合抱闸产生电机制动。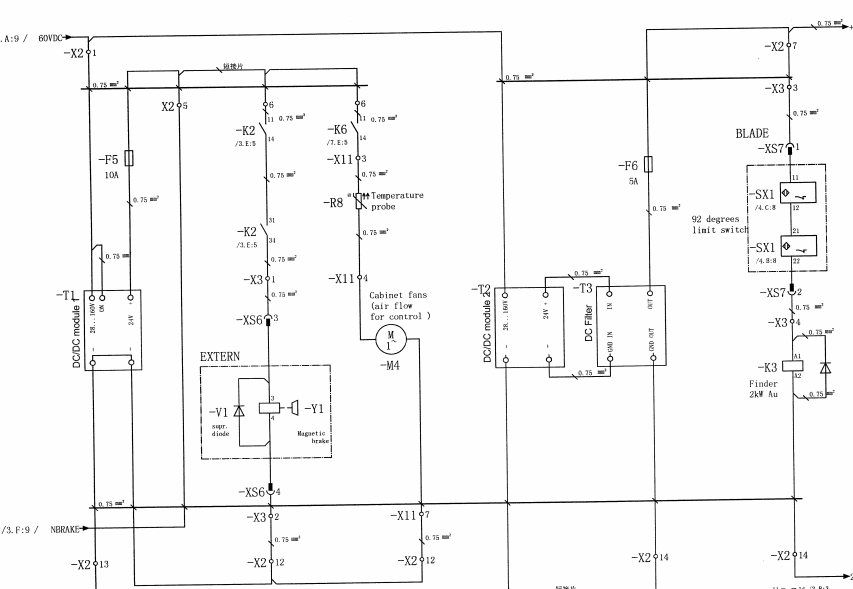
变桨电机工作原理
从变桨电机动作过程中我们可看出电磁刹车松闸涉及3个电器元器件
电磁刹车
AC2逆变器
通过故障F 、 B文件分析得出2#桨叶卡桨,判定K2触点失效,对K2继电器进行更换后进行变桨,电磁刹车无法抬闸,变桨速度慢,声音不清脆且声音较小。
再次手动变桨,发现K2继电器上二极管信号灯不亮,将二极管打开发现其内部线路已熔断,将断点焊接恢复安装好变桨,二极管信号灯在变桨时正常亮起。但变桨电机刹车还是无法抬闸,核对图纸,怀疑电磁刹车失效,测量其阻值发现电磁刹车在1.5Ω,正常的在8Ω,对比后更换变桨电机,再变桨时电磁刹车能正常打开,但变桨速度仍然不正常。
那问题来了,哪些方面会影响电机速度 1、AC2本体 2、KL4001 3、AC2输入输出 4、选编,报出故障前AC2 KL4001 AC2输入输出电压 选编都没有异常,基本上可以排除上述4个点出现问题。 那只有相序接反导致电流减小,影响电机速度。测量AC2输出电流发现只有12V,对电机相序互倒后故障消除。
总结:在故障文件判断上有一定的主观因素,导致故障判断点失误,中间状况较多影响判断,电机出厂接线柱引线异常(不常见)从报故障的时刻就想到了电机可能损坏,但主观上不想换电机的原因导致,最终经历了数小时将机组恢复正常,这又让我重新对整个电磁刹车回路都检查一遍让我对变桨电磁刹车回路及同类故障更清晰了。
[1]金风1.5MW机组故障解释手册
[2]金风1.5MW变桨驱动器I型电气原理图-A2(A版)
作者简介:
徐小刚, 1985年12月3日生于新疆省博湖县, 毕业于新疆大学电气工程及其自动化专业,现为中广核新能源(深圳)有限责任公司新疆分公司托克逊风电场检修经理。
李志刚,1984年11月10日生,毕业于中北大学,现任中广核新能源(深圳)有限责任公司新疆分公司青河光伏电站站长。
付明阳,毕业于新疆石河子大学机械设计制作及其自动化专业,现为中广核新能源(深圳)有限责任公司新疆分公司托克逊风电场检修经理。

5

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网 琼ICP备2021005105号