广西沿海铁路股份有限公司 510000
摘 要:目前,铁路线路巡检的主要工作方式仍为由大量人工完成,人工检测方法费时费力、不精准等劣势,具有检测线路效率较低的特点,在完成地质灾害区域、隧道、桥梁等艰险环境下的铁路线路检测精度要求等方面难度较大。为了提高铁路检测效率,满足各种环境下铁路线路巡检高时效性、高准确性以及高安全性等各需求,以使用多旋翼无人机在某铁路线路的三维建模实验为例,针对铁路运营安全需求,探讨基于多旋翼无人机平台的三维模型建立在铁路线路巡检中应用前景与方向。
关键词:铁路巡检;无人机;航测;铁路三维模型
中图分类号:U213 文献识别码:A 文章编号:
近年来,随着我国铁路交通的快速发展,铁路运营安全受到了前所未有的重视。目前,铁路线路各项运营设备的巡检主要由工作人员完成,但由于铁路线路跨度大、地质气候情况复杂,有很大一部分的铁路线路处于高山、丘陵等环境艰险存在地质灾害可能性较大之处或不便工作人员巡检的区域,人工检查费时费力,效率较低。多旋翼无人机具有灵活机动,受地形限制小的特点,使用无人机进行铁路线路巡检,可以提高铁路线路的检测效率,结合观测数据通过软件计算较好反映线路各项状态,并且其铁路巡检工作在时域与地域空间与铁路系统的正常运营可互不干扰。实现无人机沿铁路巡航需要对巡检路径进行规划,保证不影响运营安全,同时通过多旋翼无人机采集沿线数据,并使用采集的数据进行计算机后处理三维建模,可获得清晰直观的与实地情况完全对应的实景三维模型,可详细反应铁路沿线的路基变形、异物侵限,路基边坡滑塌变形等情况,尤其适合极端气象条件下,如铁路防洪期间台风暴雨雨后对线路两侧边坡灾害发展情况进行监测、评估、预判,为铁路管理运营部门提供综合决策信息,及时采取措施。
1 铁路巡检平台搭建
为了获取铁路沿线的实景三维数据,提高铁路巡检效率与直观性,铁路巡检平台由多旋翼无人机、地面站、三轴增稳云台、相机、IMU与定位系统组成。考虑到铁路线路的运输能力和牵引重量等因素,考虑铁路的坡度较小,故可近似将铁路线路所在的面近似视为水平面。因此在规划无人机飞行路线时,主要数据获取工作可以铁路所在平面为基准参考,并根据铁路现场障碍物及边坡高度,如跨铁路高压电网、跨铁路桥梁等,以及不同铁路等级各方面要求不一样的特点,确定不影响铁路自身运营安全需求的飞行高度,对不同铁路综合考量设定飞行参数。
2 区域重点地段模型建立
2.1 实验准备
本文选取的实验场地为某铁路线车流密度较少专用单线的路段区域,实验环境如图1。实验线路长度为100 m,宽度30米,轨道标准轨距为1435 mm,线路两侧按照现状设置并具有防护缺口,模拟真实现场情况。
2.2 实验过程
设定航测参数对某铁路区域进行三维模型重建,建立基于多旋翼无人机平台的铁路三维模型数据采集任务。任务区域如图1所示:飞行任务区域100×60m,初步安全航高30m,航向及旁向重合度均为60%,航线数量5条,第1条为正射航线,镜头倾斜角度为90度,第2至5条航线为倾斜摄影航线,镜头倾斜角度为45度。采集数据共用时18分钟,光照度保持在50000lux左右,共获取491张相片,导入context capture软件对相片进行检查,全部有效。后期处理计算机配置CPU I78700K@3.70GHz,内存 24G DDR4 3000MHz,GPU NVIDIA GeForce GTX1050Ti,处理时间共5小时,生成三维模型如图2及图3所示:
图1 铁路工程三维建模任务区域图2 铁路工程三维重建模型
图2 铁路工程三维模型细部

对建立的铁路工程三维模型进行精度分析,在模型中量取与实际工程对应的七组尺寸数据进行对比计算分析。计算结果如下表
图3铁路工程三维模型测量对比位置
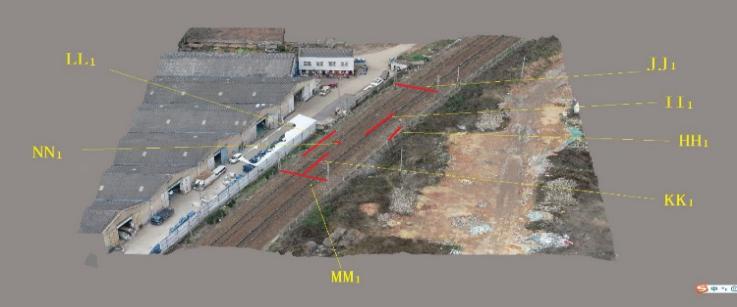
表1 铁路工程实测及三维模型尺寸
| 工况 | HH1(m) | II1(m) | JJ1(m) | KK1(m) | LL1(m) | MM1(m) | NN1(m) | 中误差 | |
| 实际尺寸 | 4.272 | 8.496 | 10.615 | 12.551 | 9.989 | 10.608 | 1.962 | ||
| 模型尺寸 | 4.27 | 8.49 | 10.60 | 12.54 | 9.98 | 10.61 | 1.95 | 0.00937 | |
2.2 实验结论
计算所得模型尺寸中误差约为0.00937,可认为模型精度尺寸误差在1cm左右,此精度等级对于大范围的路基变形、异物侵线,路基边坡滑塌变形等已可满足监测需求,并且成果直观性较强,易于确定及描述威胁位置及类型。
由于铁路线路其上方空间一般较空旷,飞行条件有保障,在建设期或运营期列车运行间隙时间段,无人机进行检测对列车运行安全不构成威胁时,适合铁路临时性、紧急性等检测。常规性对山区铁路高架桥、桥梁、隧道等重点区域航测时可采取措施进一步提升其监测精度以满足更高精度的需求,如可采用提高相机像素值、进一步降低飞行高度等方式将模型精度提升以响应高铁运营检测的要求。下一步在高铁夜间作业接触网停电如何进行低空夜间高效检测线路将进行研究。
2.3下一步精度提高措施
(1)提高无人机相机质量、提高像素值、增大机械感光元件尺寸。
(2)确保铁路运营安全前期,进一步降低飞行高度。
(3)对重点灾害、防洪重点地点等建立增加地面布设观测控制点。
(4)加强多视影像匹配算法,空中端采用RTK定位结合三维激光近景摄影测量。
3 结束语
随着科技进步发展,为了提高铁路线路巡检效率,以及满足地质灾害发生处、桥梁、隧道以及高大边坡等艰险环境下的铁路线路巡检的时效性直观性等需求,本文对基于多旋翼无人机三维建模技术在铁路线路巡检中的应用进行了研究,所提出的方案能较好地指导使用无人机对铁路线路的巡航检测、通过预埋观测进行测量以及路外坏境监控等各项工作,也可满足在特殊条件下进行铁路巡检,为铁路线路运营安全提供科技保证,具有较高的实用价值。
参考文献:
彭大雷,许强,董秀军,等.无人机低空摄影测量在黄土滑坡调查评估中的应[J].地球科学进展,2017
王帅永,唐川,何敬,等.无人机在强震区地质灾害精细 调查中的应用研究[J].工程地质学报, 2016
刘洋.无人机倾斜摄影测量影像处理与三维建模的研究[D].上海:华东理工大学,2016.
曹帅帅.无人机倾斜摄影测量三维建模的应用试验研究[D].昆明:昆明理工大学,2017.
支卫斌.无人机航空摄影测量在地形测绘中的应用[J].江西建材,2015( 8) :224-225
陈兵.基于纵横大鹏 CW10无人机在1:1000地形图测绘中的应用[J].中国高新科技,2017,1( 11):17 -19
吴迪军,郭丙轩.无人机航测大比例带状地形图试验 研究[J].铁道勘察,2017,43( 4) :1-4

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网 琼ICP备2021005105号



