临沂市产业技术研究院
临沂市妇女儿童活动中心
276000
摘要:随着科学技术的良好发展以及产业升级改造的实际标准需求,智能AGV的科学有效应用,也变成企业柔性生产设备以及仓储自动化优化升级的重要选择,自动化程度与灵活性以及安全可靠性等优秀。基于此,本文对智能AGV视觉导航控制系统研究及应用进行分析。
关键词:智能AGV;视觉导航;控制系统
前言:AGV即自动导向车在众多行业领域获得良好应用,如制造业与军事以及医药等领域。AGV可以位于具备相应地形特点的环境下,按照预期路径行驶或是达到指定地点。路径跟踪以及路障躲避属于AGV的突出功能,同样使AGV导航的重要目的。AGV导航能力以及路径跟踪精度,则同控制策略以及实施控制性能存在紧密联系。本文对智能AGV视觉导航控制系统研究及应用进行分析,以此为有关人员提供帮助参考。
1、智能AGV视觉导航方案规划
1.1智能AGV车体结构设计
视觉导航型智能AGV,具体涵盖车体架构与驱动单元、视觉导航模块、通讯模块以及电源模块等装置,模块之间协同工作,下图为智能AGV车体结构。本文主要对视觉导航模块采取重点研究,视觉传感器位于车底部以及前部设置安装。
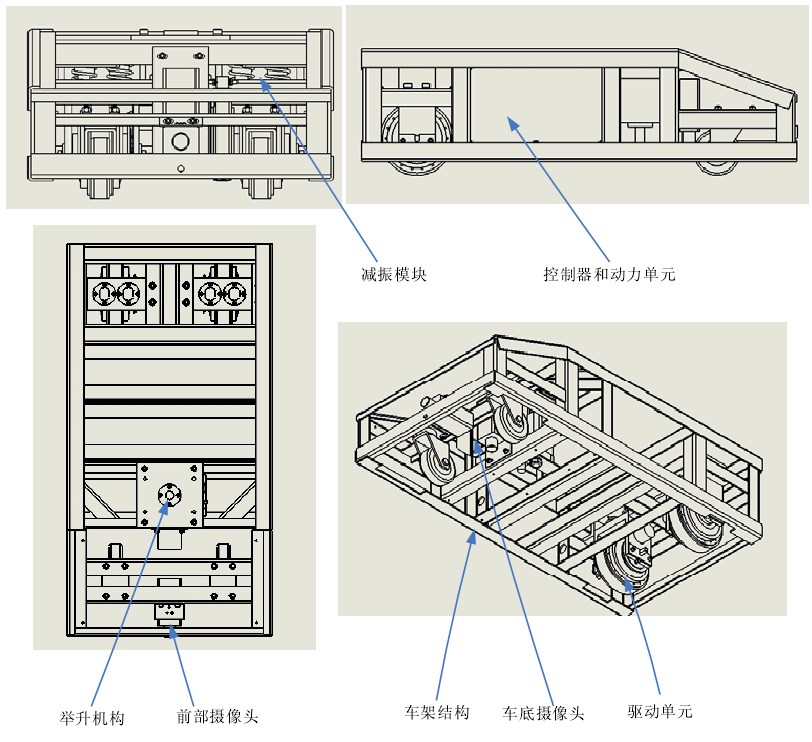
图1智能AGV车体结构
1.1.1车体分析
本文研究的智能AGV属于潜伏式视觉导航型,四轮后驱模型,设置自动升降销,潜伏范围较大,基于视觉监测标识符以及其他辅助定位信息完成精准定位,车体长、宽、高依次为1.2m、0.8m、0.35m,为确保车架稳固耐久,车架通过钢板焊接并采取钣金成型。车体属于系统稳定运行的关键平台。
1.1.2视觉导航模块
视觉导航模块涵盖视觉传感器以及车体路径信息采集视觉传感器,前者可完成路径通过性监测,检测范围可以进行具体调整。后者可完成引导路径信息获取,若智能AGV运行期间产生偏差的情况下,向图像处理器以及运动控制器进行上传。视觉导航模块属于研究关键内容。
1.1.3安全模块
安全模块涵盖物理单元以及非接触检测单元,物理单元,即车辆前段安装设置的防撞杆以及车体四周设置的防撞设施,非接触检测单元,即视觉与超声波信息结合形成的障碍物检测模块,能够完成智能AGV主动避障或是安全距离之内可以完成停车报警。
1.2智能AGV运动模式构建
1.2.1智能AGV驱动模式
智能AGV运动模型,即对驱动单元进行运动分析,当前,智能AGV采用的驱动模式相对较多,具体详见下图。
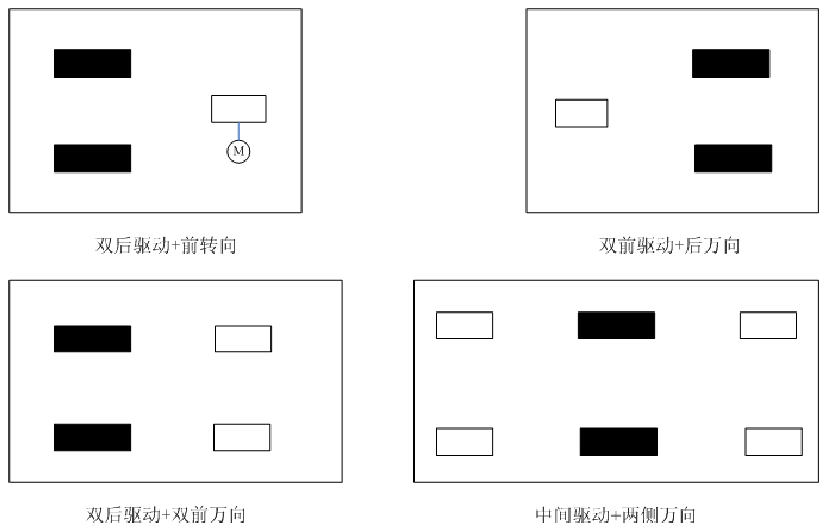
图2 智能AGV驱动方式
本文研究智能AGV以双后轮差速驱动,双万向轮为前轮的四轮模型,并以轮毂式电机为主,缩减车体宽度的同时,提升灵活性。
1.2.2智能AGV运动模型
为构建智能AGV运动模型,应先对驱动方式做出明确,之后完成运动学分析,最终构建运动模型。本文以两轮差速式独立驱动为主,方向通过差速变化进行控制,详见图3,驱动轮位于后侧,确保竞相平行以及轴向中心线,且可完成独立驱动。为构建科学运动模型,对运动状态做出相应的假设:第一,车体属于刚性;第二,水平运动;第三,左右轮保持相同受力,同地面不发生滑动;第四,空气阻力忽略不计。
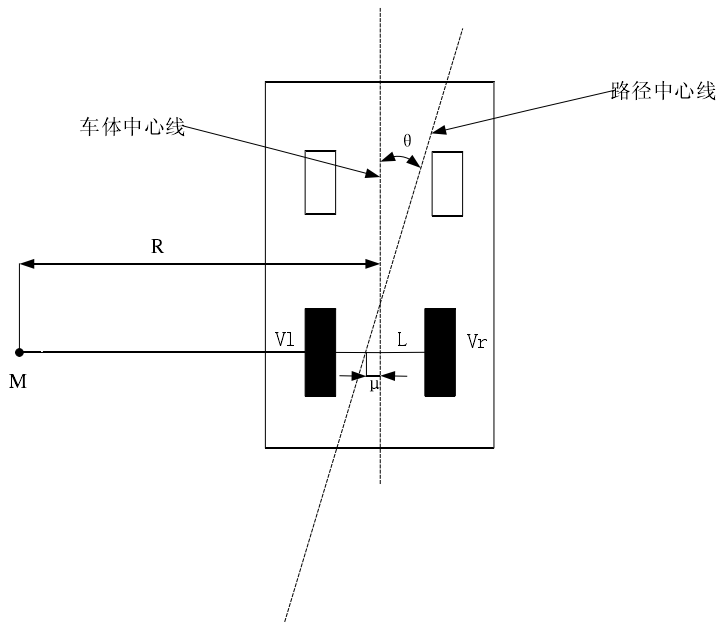
图3 智能AGV运动示意图
L代表驱动轮间距;R代表转弯半径; 以此代表左右轮线速度。
以此代表左右轮线速度。
智能AGV运行过程中,调节驱动轮速度,实现转向与转弯半径的变化,即控制 。智能AGV保持正常运动,假设驱动轮沿中心线速度
。智能AGV保持正常运动,假设驱动轮沿中心线速度 ,则可以计算出
,则可以计算出 关系式。
关系式。
 (1)
(1)
假设转交速度 ,
,
 (2)
(2)
 时间,智能AGV同路径中心线之间距离、角度偏差
时间,智能AGV同路径中心线之间距离、角度偏差 。通过上述公式,可计算出AGV运动方程,
。通过上述公式,可计算出AGV运动方程,
 (3)
(3)
 (4)
(4)
 较小,基于(3)则可计算出 变化率,
较小,基于(3)则可计算出 变化率,
 (5)
(5)
同理,可计算出 变化率,
变化率,
 (6)
(6)
基于 、(1)、(5)、(6),可建立基于 为状态变量的智能AGV状态方程。
、(1)、(5)、(6),可建立基于 为状态变量的智能AGV状态方程。
 (7)
(7)
智能AGV保持直线运动情况下, ,
, 。
。
基于(7)得知,智能AGV运动期间, 变化仅同驱动轮速度差存在联系,即可通过速度差对角度、距离偏差做出有效调节,确保正常导航。
1.3智能AGV视觉导航系统结构设计
基于视觉导航技术,确保智能AGV可以自动引导,具体结构详见图4。
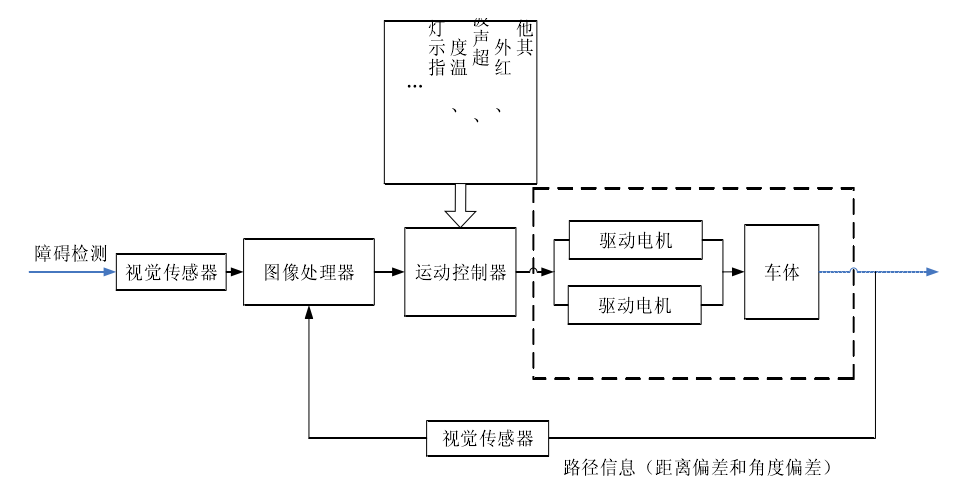
图4 智能AGV视觉导航系统结构
由图4得知,系统结构具体涵盖两部分:第一,车前安装设置的视觉传感器,负责障碍物监测,避免出现碰撞,实现智能AGV自动上线。第二,车底安装设置的视觉传感器,负责获得路径中心线同车体中心线之间偏差图像信息,利用图像处理器完成系统运算,科学计算 ,并及时上传至运动控制器。此外,标识符图像信息,完成速度调节与停车。
最终图像处理结果,对指令发送至运动控制器,以此完成对驱动电机的有效控制,确保智能AGV稳定正常运行。
2、试验和仿真
2.1避障试验
2.1.1超声波模块测试
(1)障碍物布局设计
测量传感器波束角实验期间,障碍物布局对结果的影响,详见下午所示。超声波探头同障碍物平面保持平行与垂直的情况下,有效角度具体是40°、60°。
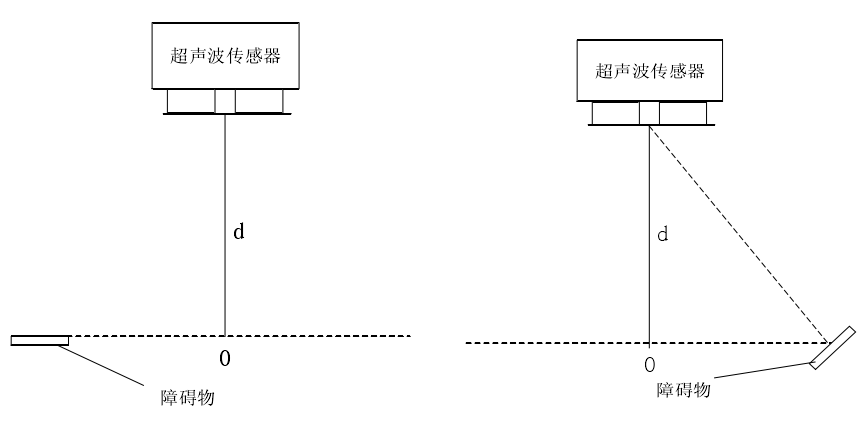
图5 超声波模块布局
基于实验得知,超声波探头同障碍物平面保持平行,位于左右极限部分,障碍物角度转向传感器位置,速度介于0-20°之间,仍旧可对物体做出有效监测。超声波探头同障碍物平面保持垂直,位于左右极限部分,障碍物平面同传感器保持相对,才可被有效检测。鉴于障碍物平面指向具有的随机性,波束角以40°为宜。
2.2路径检测试验
2.2.1路径监测试验
基于智能AGV同路径形成的偏差获取算法,通过PC完成算法仿真。
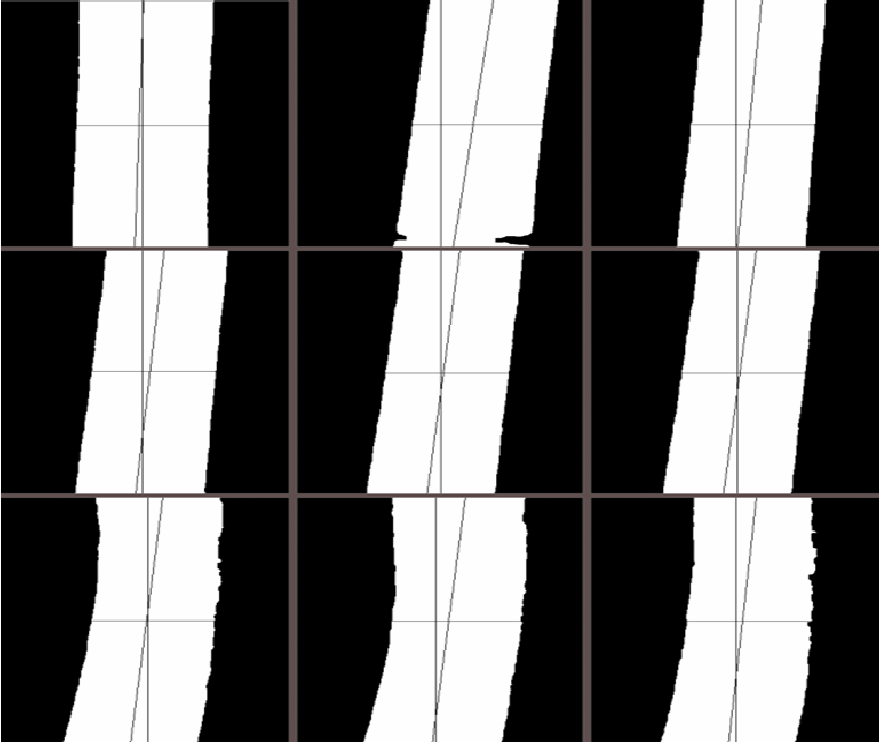
图6 智能AGV与路径偏差
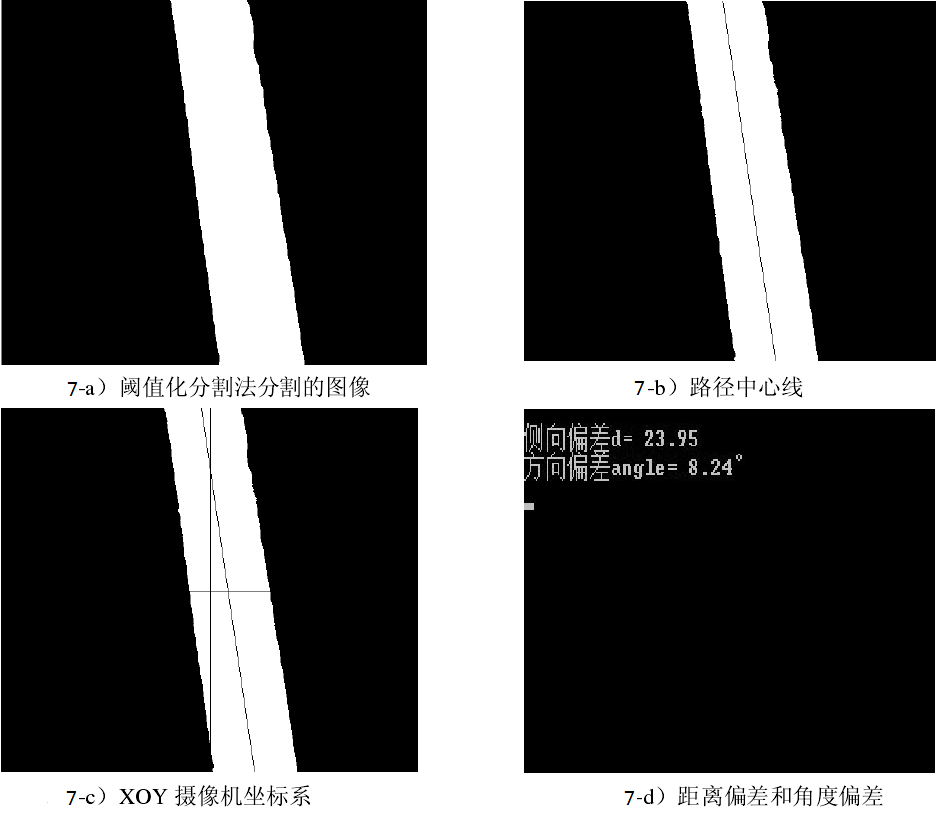
图7 位姿偏差获取仿真
2.2.2路径检测结果分析
基于实时测量获取的智能AGV同路径之间的距离、角度偏差,随机选择部分数据点做出系统分析,通过matlab软件绘制距离、角度偏差同时间之间的关系图像,详见图8、9。
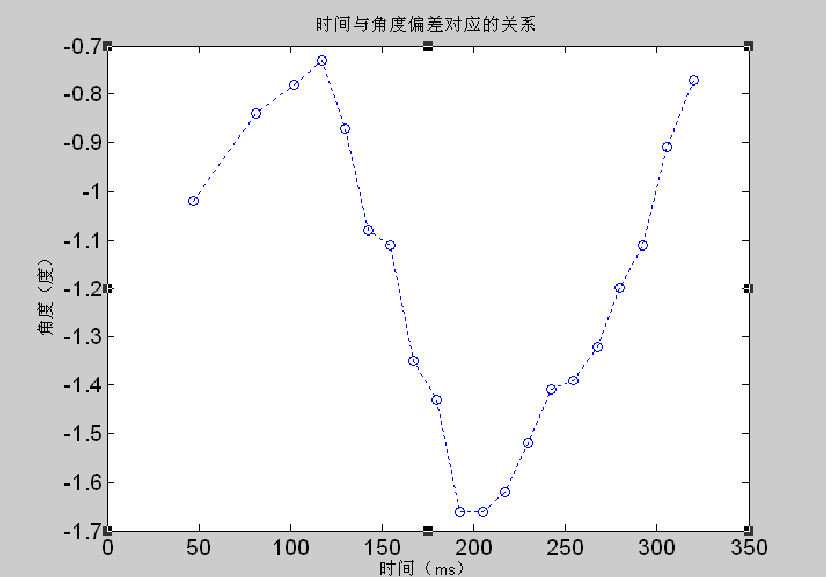
图8 智能AGV与路径的角度偏差变化
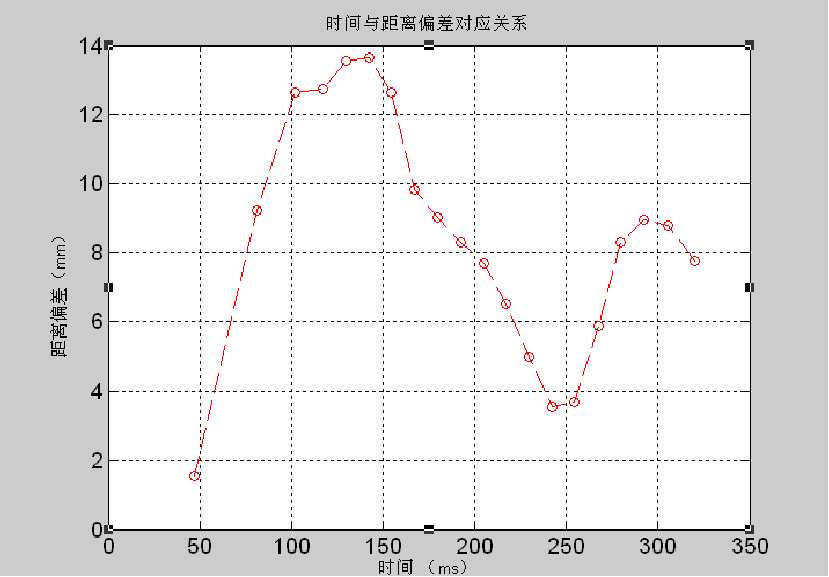
图9 智能AGV与路径的距离偏差变化
基于仿真记过恩能够得知,设计研究的偏差获取算法,可以相对准确的获取智能AGV同预设路径形成的位姿偏差,智能AGV可以基于偏差,对方向与速度做出有效调节,从而有效实现自动导航功能。
结论:综上所述,随着科学技术的快速发展与产业升级改造的实际标准需求,智能AGV的科学有效应用,也变成企业柔性生产设备以及仓储自动化优化升级的重要选择,智能AGV依已然变成现代化制造业最具高新科技代表性的产品,自动化程度与灵活性以及安全可靠性等优秀,在众多行业领域获得良好应用。
参考文献:
[1]张在房,沈敏德.基于电子地图的视觉AGV导航控制系统研究[J].山东轻工业学院学报(自然科学版),2015,19(02):16-21.
[2]方雪清,黄晓婷,郑灿塔.基于嵌入式视觉导航的AGV控制系统[J].现代计算机(专业版),2018,216(08):123-125.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网 琼ICP备2021005105号



