天津市华翼蓝天科技股份有限公司 300380
摘要:在计算机技术以及电子技术快速发展的背景下,飞行模拟器在不断更新,其在航空领域方面有着巨大的发展潜力,能给人们带来显著的利益及效果,基于此,本文就飞机模拟器运动模拟原理以及六自由度运动系统的组成进行了分析,
对数据模型的选取、基本假设以及六自由度运动结构仿真模型的建立等内容进行了探讨,以便能为相关人士提供参考建议。
关键词:运动模拟原理;系统组成;数据模型
引言:模拟器在航空领域得到广泛运用,在该领域中,虚拟技术以及计算机技术得到普遍应用,在企业运营过程中,大量使用清晰度较高的显示设备,进一步推动了模拟器的快速发展,在一定程度上有助于航天事业的发展。
1.飞机模拟器运动模拟原理
通常情况下,飞机载体的推动力较小,也就是说其频率偏低,加速度偏小,同时模拟器的运动范围受到限制,不能真实反映出飞机的运动情况,因此依据人对运动存在偏差的现象,进一步得以实现。首先通过飞行员输入运动指令,形成有关的运动参数,进而将运动参数传送到飞机模型中,进而转变成实际的运动参数,再通过逼真度模型中的模拟平台,生成平台的模拟参数,通过运动模拟器模型,将模拟参数作为运动模拟器模型的输入信号,进而产生平台的驱动力,最终通过执行机构的作用,推动平台运动。一般情况下,六自由度运动结构仿真模型的建立由三个过程组成。
2.六自由度运动系统的组成
六自由度运动系统的组成主要包括其运动机构、计算机以及相关的驱动装置,计算机主要用来计算飞机运动中的角速度、运动加速度以及飞机转动时的加速度等,运动加速度以及飞机转动时的加速度不需要通过质心进行转换,仅仅需要飞机运动向惯性坐标系的转移。飞机运动的驱动装置与承载能力及运动精确度息息相关,是运动系统的关键成分。由于原始的驱动手段主要是针对于大负载量的模拟器,因此目前大部分运动模拟系统都使用传统驱动方式。
电动驱动方式的元件主要有杠螺母副以及电机等,电动驱动方式具有以下优点:有着运动较高的速度及精度,操作起来较为简便,其缺点是承载能力有限。这种驱动方式主要应用于精度度要求较高、以及运动速度较快及承载能力较小的情况下。飞机模拟器的驱动方式通常采用液压驱动,在电机技术不断发展的背景下,电动驱动方式将不断取代液压驱动方式,必然将成为主要的驱动方式。
3.力学模型的建立
3.1数据模型的选取
为了确保建立模型的可使用性,同时也能模拟出实际情况,依据六自由度运动的运动特征,将运动机构质量划分为两种成分质量,也即是运功平台上的质量(主要是上平台的总负载,包括其平台的质量、座位椅子的质量以及驾驶人员的体重)以及驱动杆的质量(主要是指6个驱动杆的质量)。
3.2基本假设
对于平台以及驱动杆之间产生的摩擦忽略不计,在电机运行下驱动杆产生的摩擦力也忽略不计;将电机上的驱动杆看成可以伸缩的刚性杆;由于上下平台之间的距离较小,因此可以对其忽略不计;运动平台上的质量及驱动杆的质量应当均匀,也就是说中心与质心具有协调性。
4.六自由度运动结构仿真模型的建立
一般来说,六自由度运动结构仿真模型的建立由三个过程组成,也就是利用几何建模、限制机构以及施加负载,具体内容如下所述:在仿真模型的建立之前需要完成以下准备工作,对单位的设置,有多种单位可以选择,如CGS、IPS以及MKS等,依据国际使用标准,选择MKS单位进行设定;依据实际需要,进而设定工作栅格以及类型直角坐标系,其间隔为0.5*0.5cm,尺寸大小为75*75cm;建立坐标系以及确定重力加速度,Z轴为设定为负方向,同时为坐标方向进行调整,Y轴负方向为重力方向;为了在取点时便于操作,设置键盘上的F4具有显示窗口坐标的功能。
通过计算机的辅助信息分析技术,对机械运动的动力学及运动学进行分析,在任何时候及不同速度变化情况下,进而确定系统以及构件的位置,通过使用软件,自动建立有关数字方程组,进而来计算出系统以及构件运动时所需要的作用力以及反作用力,这种优势是非常明显的。当虚拟样机的工作情况符合物理样机的工作情况,可以对其模型进行优化,用不着与物理样机类似的形状,也可以对一些影响较小的因素进行忽略,基于这样的建立思路,建立六自由度运动结构仿真模型如下所述:
在工作栅格里建立相关的基座,选择图标的类型为圆柱形,连接的属性类型为Ground,工作栅格的半径为60cm,其长度为0.4cm,在基座里建立三个坐标点,其坐标值分别为(528.6,320,0),(-528.6,320,0),(0,-500,0);对运动平台的建立:在距离基座1米处的地面建立平面坐标系,并在上面绘制圆柱体,其连接的属性为New Part,其半径为40cm,长度为0.1cm。选择物体的质量为120千克,并在平面内建立三个坐标点,其分别是(-350,0,1000),(245.2,220,1000),(-245.2,220,1000);利用杆独特的属性,在上下不同连接点之间建立杆,杆的数量为2,其半径分别为0.2cm,0.3cm,其长度分别为70cm以及50cm;
驱动杆通常有两部分组成,既是大杆与小杆,两杆都简化为实心的圆柱体,用螺旋副进行约束,且定义另一个移动副,以助于大小杆之间的转动及约束。电机与大杆之间设定的连接方式为刚性连接,因此需要在两者之间采用固定铰链进行 连接。为了达到验证的目的,不同显示出电机,可以用附加驱动力来置换执行机构的运动,也就是在模拟仿真过程中,将力施加在驱动杆上,从而达到验证的目的。简化过后的驱动杆,通过基座以及动平台等的互相连接,从而构成全面的运动约束集合,进而完成整个模型的建立,如图1所示。
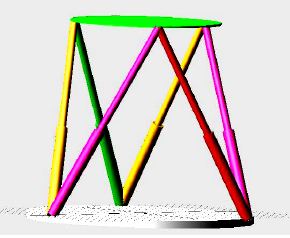
图1 六自由度平台模型图
结论:总的来说,在电机技术不断发展的背景下,电动驱动方式将不断取代液压驱动方式,必然将成为主要的驱动方式;通过计算机的辅助信息分析技术,对机械运动的动力学及运动学进行分析,在任何时候及不同速度变化情况下,进而确定系统以及构件的位置;通过使用软件,自动建立有关数字方程组,进而来计算出系统以及构件运动时所需要的作用力以及反作用力。
参考文献:
[1]韦振宇. 航空模拟器运动系统设计与研究[D].南京航空航天大学,2018.
[2]郭德庆,应海林.飞行模拟器及其运动系统的发展现状及前景[J].黑龙江科技信息,2018(03):100.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网 琼ICP备2021005105号



