浙江省工程物探勘查设计院有限公司 310000
摘要:随着无人机摄影技术的发展,无人机在测量领域发挥的作用越来越大。无人机在在山区进行摄影测量时,测区内如果高差太大,则不能同时保证低海拔地区的分辨率和高海拔地区的重叠度。这就需要根据地形高差,把作业区划分为多个摄区,分区拍摄,确保每个区域内分辨率和重叠度都能满足要求。详细介绍了无人机低空摄影测量在山区的应用。
关键词:山区;低空摄影测量;摄区划分
1引言
近年来,随着基于无人机平台摄影测量技术和无人机携带数码相机快速发展,无人机摄影测量系统在测绘地理信息产业中的应用越来越广泛,已经成为采集地理空间数据不可或缺的一种方式。与传统地形图测量方法(全站仪、RTK)、卫星遥感和大飞机航空摄影测量相比,无人机航测具有时效高、分辨率高、成本低、损耗低、风险低,受天气和空域的影响小,非接触更安全,能够更加快速实时的获取危险地区、困难地区高分辨率影像等优势。正是无人机摄影测量系统的这些特点,使得其能够快速高效的完成大比例尺地形图、数字高程模型、数字正射影像等数字产品的制作,从而逐步在测绘地理信息产业得到的广泛应用,并逐步推广到大比例尺地形图的制作与更新。
无人机低空摄影测量是一项系统性工程,包括飞前准备,影像获取,影像处理,3D产品生成多个环节。其中飞前准备是这一系统的基础,关系到整个工程的飞行架次、影像数量、影像质量,左右整个工程的经济效益和出图效率。
2无人机低空摄影测量系统
无人机低空航摄系统的基本构成包括:影像获取系统、内业处理系统(图1)。
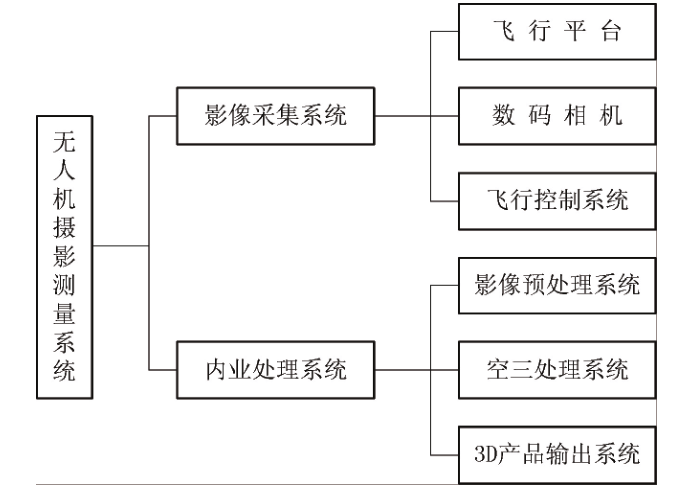
图1 无人机低空摄影测量系统组成
无人机低空摄影测量作业步骤大致如下:飞前准备、影像获取、影像处理。
第一个步骤主要包括以下内容:首先要对无人机的摄区进行划分,然后分区设计航高、重叠度、航线间距、摄影基线长,设计完成后,要在地面站软件进行测试是无人机否可以安全飞行等。第二个步骤是在第一个步骤的基础上飞行作业,获取影像数据。第三个步骤主要是对外业飞行获取的无人机影像进行处理,通常包含以下几项内容:影像的预处理、影像的空三加密、生成3D产品等。
以上3步骤中,第一个步骤是基础。下面主要讲述第一个步骤:飞前准备。
2飞前准备应解决问题
2.1摄区划分
摄区划分主要解决两个问题:低海拔地面分辨率和高海拔相片重叠度。在指定相机后,飞行高度与地面分辨率关系如下:
H=(R+f)/a(1)
式中H表示相对航高,R表示地面分辨率,f表示相机焦距,a表示相机分辨率。由公式(1)知道H和R成正比,即飞机离地面越近拍摄的影像就越清晰,反应地物地貌就越详尽。理想中地面没有高差的情况下,当确定了地面分辨率和航摄相机既能确定飞机的相对行高,飞机保持这个高度飞行就能获得满足分辨率的影像。但是实际情况是地面是有高低起伏的(如图2所示),相对航高是时刻变化,在选定航摄相机情况下,地面起伏引起的相对航高变化直接影响影像地面分辨率。这时飞机航高的选择就是要保证最低海拔的地面分辨率。
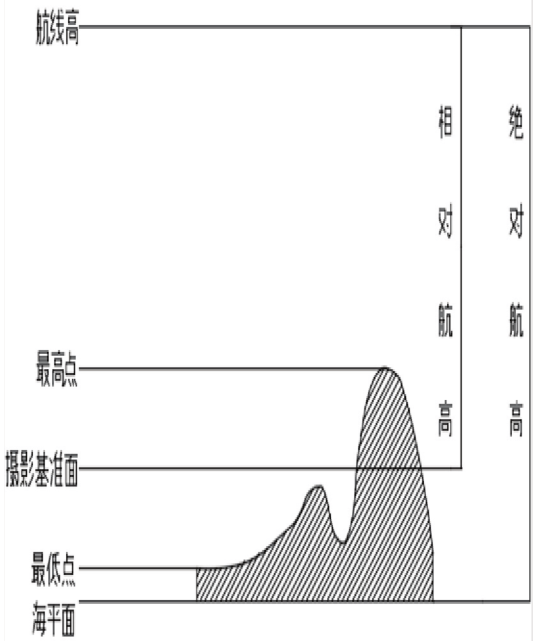
图2航高与分辨率图
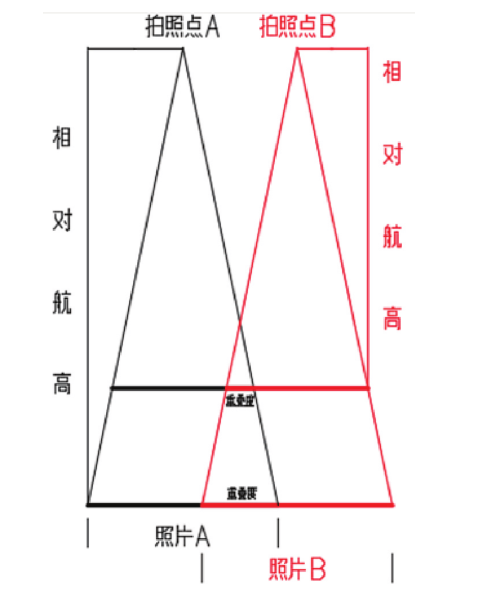
图3航高与重叠度图
地面的起伏不但对影像分辨率有影响而且还会影响影像重叠度。如图3所示当相对航高变小时,影像的重叠度也会变小。我们知道航带间距、摄影基线长和旁向、航向重叠度有如下关系(式中为摄影像片像幅的宽度,为摄影像片像幅的宽度,为旁向重叠度,为旁向重叠度,m为摄影比例尺分母,为相机焦距,为相对航高)。
D=ly×m(1-q) D=Lx×m(1-p) 1/m=f/H (2)
可以推导出。
q=1-[(D×f)/(Ly×H)]p=1-[(D×f)(Ly×H)] (3)
由公式(3)可知其他变量保持不变,相对航高H与相片重叠度q、p成正比,相对航高越小,相片重叠度越小。重叠度过小会导致同名象点过少,进而后面的空三环节不能通过。这时飞机航高的选择就是要保证最高海拔的重叠率。
为解决低海拔地区地面分辨率和高海拔地区重叠率的问题,低空数字航空摄影规范(《CH/Z_3005-2010低空数字航空摄影规范》)规定,同一摄区内,高差不应大于1/6相对航高。如果H高-H低≤1/6H则不需要分区飞行,如果H高-H低>1/6H则需要分区飞行(H高为测区最高海拔,H低测区最低海拔,相对航高)。
2.2航高确定
航高是指飞机的绝对高度,即飞机的飞行海拔(图2所示)。由图2可得公式(公式中为测区最高海拔,H低测区最低海拔,H高为摄影基准面海拔,H相对航高)。
H绝=H叁+H H叁=(H低+H高)/2 (4)
分区完成后,每个摄区的最低海拔H低和最高海拔H高即可确定。由公式4可计算航高。
2.3设置重叠度、航线间距和摄影基线长
一般情况下相片重叠度的要求如下:
(1)相片的航向重叠度一般应为60%~80%,最小不应小于53%;
(2)相片的旁向重叠度一般应为15%~60%,最小不应小于8%。
由于无人机机身较轻,飞机在天上飞行受气流影响大,飞行姿态不稳定,重叠度会出现偏差,为避免重叠度低于上述要求。建议航向、旁向重叠度设置大一点。经验值旁向重叠度70%~80%、航向重叠度50%~60%。重叠度确定后,由公式(2)可以计算,航线间隔D和摄影基线长B。
3实例分析
某一山区需进行航空摄影测量(图4),最低海拔H低为160米,最高海拔H高为850米。要求成图比例尺为1:1000,地面分辨率为0.08m,使用SONYa7RⅡ分辨率0.0045mm焦距35mm数码相机拍摄。
根据公式(1),可以计算出相对航高H为620米。1/6H为100米,测区高差为H高-H低=690米>1/6H,那么需要划分摄区。(H高-H低)/(1/6H)=6.9取整数为7,则大概需要划分7个摄区。我们从最低海拔开始划分摄区,第一摄区最低海拔H低为160米,则最高海拔H高=H低+1/6H=260米,由公式4可计算摄影基准面H叁=(H高-H低)/2=210米。同理可计算出第二摄区H叁为310米,H低为260米,H高为360米;第三摄区H叁为410米,H低为360米,H高为460米,依此类推第七摄区H叁为805米,H低为760米,H高为850米。
根据各摄区的最低海拔和最高海拔范围结合GoogleEarth可进行摄区划分。打开GoogleEarth软件,导入测区范围线(图4),打开范围线的属性对话框(图5),对话框里面有海拔高度,改变海拔高度可调节KML面的海拔,选择绝对高度260米,可得到一个覆盖面。沿着覆盖面把范围圈出来保存为1摄区(图6)。然后选择绝对高度360米把范围圈出来,保存为2摄区,依此类推划分第三、四、五、六、七摄区(图7)。
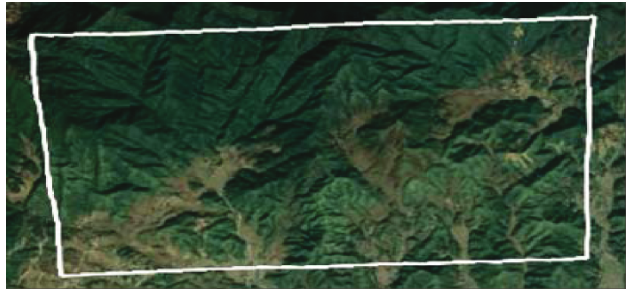
图4测区范围线图
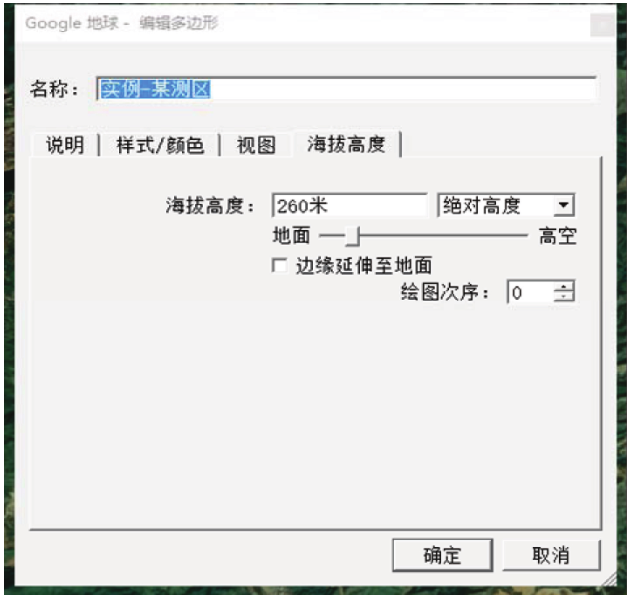
图5属性对话框图

图6 1摄区范围线图
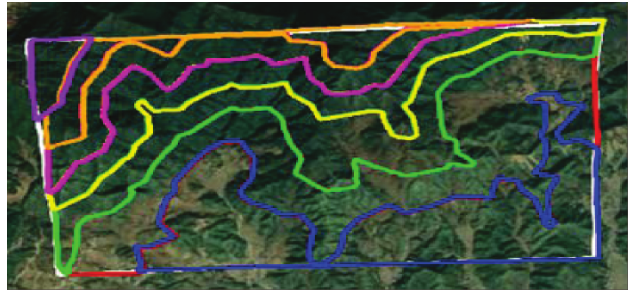
图 7 1~7 摄区范围线图
至此所有摄区划分完毕,每个摄区的最大高差均不大于1/6相对航高。在每个摄区内即能保证最低海拔的地面分辨率,又能保证最高海拔的重叠度。
把划分摄区的范围线导出为KML/KMZ格式,导入各自的飞控软件,生成飞行计划。生成的飞行计划如图8所示(2摄区)。飞行计划生成后,为了保证飞行安全(避免与山体相撞),应该查看离线高程数据,飞机航线与山体剖面线间距应该保持在安全距离,一般为150米(图9)。确保飞机安全后,保存飞行计划,外业飞行时直接调用即可。
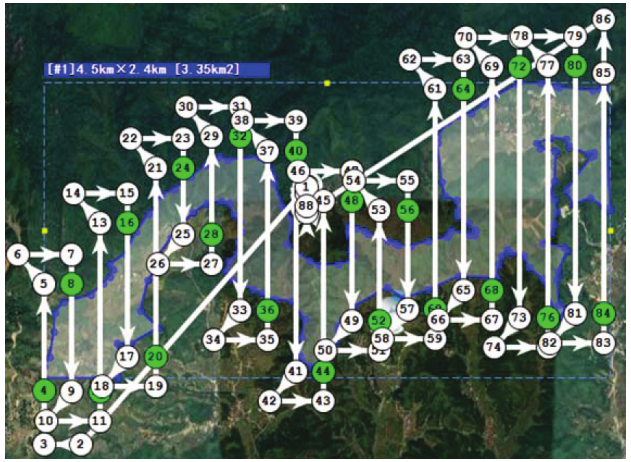
图8飞行计划图
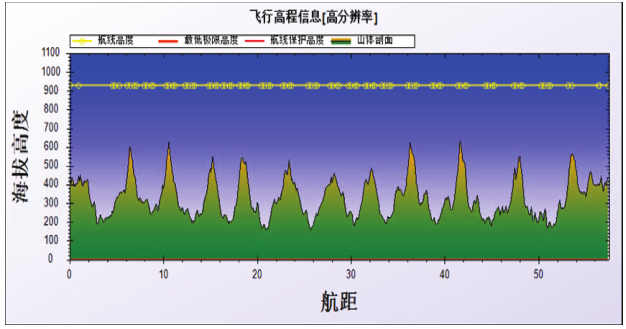
图9高程预览图
4结论
(1)在山区的数字航空摄影中,为了能够同时满足低海拔地区的地面分辨率和高海拔地区的相片重叠度,需要进行分区拍摄。利用Google Earth的面状区域相对高度可以调节功能,结合同一摄区内相对高差不能大于1/6航高。能够把摄区内允许最高海拔的覆盖范围计算出来,进而画出摄区范围。这样大大提高了作业效率,方便了山区摄影测量摄区划分。
(2)由于山区地形地表起伏较大,飞机的飞行安全尤其重要,虽然在划分域内,飞机的飞行安全可以保证。但是飞机在进入航带前有一个预进调整段,这时飞机是在划分区域外飞行的,并不能确保飞机安全。所以飞机起飞前一定要进行高程预览,确保飞机处于安全高度后才能起飞作业。
参考文献
[1]覃泽颖.PPK无人机航测系统在大比例尺地形图测绘中的应用研究[D].广西:桂林理工大学,2017.
[2]邓琴.基于DPModeler的倾斜影像三维建模[D].东华理工大学,2015.
[3]王洁.数字摄影测量在西部地形图测绘中的应用研究[D].西安科技大学,2015.
[4]杨润书,马燕燕,殷海舟.低空无人机航摄系统地面分辨率与航高的关系研究[J].地矿测绘,2013,29(03):1-10.
[5]张友超.无人飞艇地理国情监测系统关键技术及大比例尺成图实践[D].东华理工大学,2014.
[6]郑史芳.无人机数字正射影像图生产过程经验与优化[A].中国测绘学会科技信息网分会.全国测绘科技信息网中南分网第二十八次学术信息交流会论文集[C].中国测绘学会科技信息网分会:中国测绘学会科技信息网分会,2014:6.
[7]朱武,严荣华.基于DEM的航空摄影技术设计方法[J].测绘科学,2002(04):42-45.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网 琼ICP备2021005105号



