(中国水利水电第六工程局有限公司,辽宁 沈阳 110179 )
摘要:本文讲述了GAT磁悬浮陀螺全站仪其实就是陀螺仪和全站仪的结合体,运用陀螺仪的任意点定向,用全站仪的短距离高精度测点功能,来完成超长隧洞的精准贯通。
关键词:陀螺全站仪 定向 隧道测量 导线精度
引言: 随着GPS 技术的发展与普及,测量的工作也越来越简单便捷。但因为地下工程GPS接收不到卫星的信号。所以要选择GAT磁悬浮陀螺全站仪来解决全站仪因距离太长而带来的误差影响。
一、GAT磁悬浮陀螺全站仪简介
GAT高精度磁悬浮陀螺全站仪一次定向精度为3.5″~5″。该仪器采用磁悬浮替代传统陀螺经纬仪的悬挂带技术,GAT磁悬浮陀螺全站仪原理是运用了磁悬浮技术,没有摩擦系数,大大提高仪器精度和可靠性采用观测过程陀螺马达自动回转技术,首次实现了陀螺定向成果的左右盘位观测与数据处理理论、方法、模型,消除或减弱了陀螺定向的系统误差;通过系统的USB接口可将寻北过程中采集的6万组数据实时传输到外接数据存储设备中,对后期数据处理并过对这些数据的分析和判断以提高数据测量精度和可靠性。
二、超长隧洞精确贯通使用陀螺仪的必要性
在隧洞的多个同向和对向的开挖作业中,为了贯通测量而产生的偏差我们称之为贯通误差。贯通误差又分为:
1、纵向贯通误差,即误差产生的方向和隧洞的中心线保持一致;
2、横向贯通误差,即误差产生的方向和隧洞的中心线为垂直关系;
3、竖向误差,即高程方向产生的误差。
其中,纵向贯通误差对隧洞质量影响甚微,竖向贯通误差容易控制,但横向贯通误差影响隧洞中线几何形状,如果超限将会直接影响隧洞质量,且横向贯通误差在测量中难以控制,是隧洞贯通测量关注的重点。
在进行贯通测量时,测量误差的产生是不可避免的。贯通误差的来源包括两种,一种是地面控制测量以及洞内控制测量的测量误差,另一种是联系测量产生的误差。 这些误差会对联合掘进工作面的精确度产生一定的影响,导致它们无法精确的实现贯通。
通过平洞或斜井采用几何定向方法传递坐标与方位角时,一般采用布设导线方法对洞内外控制点进行连测即可。一井定向、两井定向是通过悬挂钢丝垂球线将地面控制点的坐标和方位角传递到地下的测量工作。由于采用陀螺经纬仪定向不受时间和环境限制,操作简便而且能够保证较高的定向精度,因此已经逐渐取代了沿用已久的几何定向方法。
在长距离隧洞的贯通测量中,为了提高起始测量点三维坐标精确度,保障起始测量边的方位精确度,需要进行陀螺定向测量确定洞内导线起始方位角;采用在超长洞内导线每隔2~3km加测一条陀螺定向边的方法,对隧洞的导线方位角误差进行有效控制,提高导线的点位精度,改善横向贯通误差。
三、陀螺定向方案实施步骤
1.在地面已知边上采用三测回测量陀螺方位角,测定综合仪器常数;
2.在洞内定向边上,进行两测回测量陀螺方位角;
3返回地面后,在原已知边上,测量三测回陀螺方位角,重新标定仪器常数,以检核仪器稳定性;
4.同一边任意两测回测量陀螺方位角的互差或同一定向边两次独立陀螺定向平均值应不大于陀螺经纬仪标称精度的![]() 倍;
倍; 倍=10″
倍=10″
5.洞内、外观测应由同一观测者进行,仪器在搬运时,要防止颠簸和震动;
6.地面观测时,仪器、三脚架和电源部分要避免阳光直射,并尽可能在温度变化较小、天气晴朗和风小的时间里进行;
7.仪器应严格整平,观测过程中水准气泡偏离不得超过0.5格。每测站完成测量后,应关闭陀螺10—15min,保证马达房降温。
此次陀螺定向使用的GAT陀螺全站仪,标称定向精度为5″,因此要求同一边任意两测回测量陀螺方位角的互差,不得超过10″;对于超限数据应在现场予以补测。
四、陀螺定向数据处理
根据设计院提供的地面控制点坐标,计算地面各仪器常数边坐标方位角以及测站点子午线收敛角。再根据![]() (其中
(其中![]() 为测线的真北方位角;
为测线的真北方位角;![]() 为测线的坐标方位角;
为测线的坐标方位角;![]() 为测站点子午线收敛角,
为测站点子午线收敛角, 可通过《子午线收敛角系数表》计算得到)可得地面仪器常数边的真北方位角。再根据
可通过《子午线收敛角系数表》计算得到)可得地面仪器常数边的真北方位角。再根据 (其中
(其中![]() 为测线的陀螺定向值;
为测线的陀螺定向值;![]() 为陀螺全站仪的仪器常数)结合陀螺的地面定向成果,可由公式
为陀螺全站仪的仪器常数)结合陀螺的地面定向成果,可由公式![]() 计算陀螺仪器常数
计算陀螺仪器常数 ,根据白塞尔公式对陀螺仪器常数进行精度评定。由
,根据白塞尔公式对陀螺仪器常数进行精度评定。由 ,可计算待定边坐标方位角,利用双观测列公式进行精度评定。得出真实的方位角。
,可计算待定边坐标方位角,利用双观测列公式进行精度评定。得出真实的方位角。
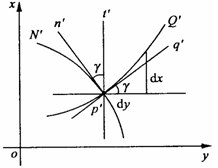
图1 坐标方位角的计算 图2 子午线收敛角
五、超长隧洞加测陀螺方位角的横向贯通误差预计
新疆T3勘探试验洞全长5324m,主洞上游长18253m,与T3项目上游贯通的工程为T2+项目,T2+勘探试验洞全长3825m,主洞长18347m。隧洞贯通的总长度为45749m,根据以上数据对该贯通面进行实际贯通误差估算,并对加设陀螺边后的数据进行对比。
地下导线计划采用徕卡全站仪进行测量,标称测角精度0.5″,测距精度1mm+1ppm,主洞段采用交叉双导线的布网形式,平均导线边长300m,洞口点后视边长200m,
根据导线网型和仪器各项精度指标,对喀双隧洞两斜井间T2+→T3(主洞段长36.6km)进行贯通误差预计。主洞段测角精度取1″,支洞(斜井)导线网型暂定为交叉双导线,测角精度取2″,陀螺定向精度取3.5″。
表1 贯通误差预计各项精度指标
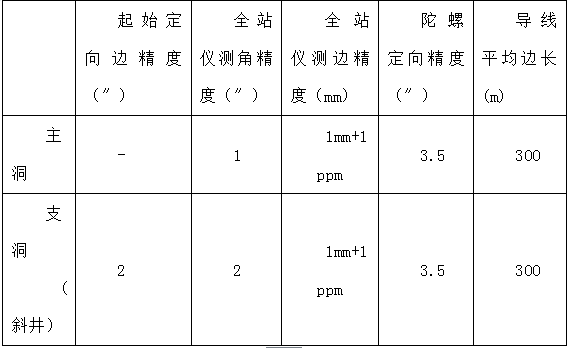
表2 两斜井间贯通误差预计结果
测量方案 | 起始定向边误差 引起的贯通误差 (mm) | 斜井测量误差 引起的贯通误差 (mm) | 主洞段测量误差 引起的贯通误差 (mm) | 贯通误差 (mm) | 综合贯通误差 (mm) | |
未加测 陀螺边 | 进洞口 → 贯通面 | 215 | 113 | 405 | 472 | 683 |
贯通面 → 出洞口 | 233 | 156 | 405 | 493 | ||
加测8条 陀螺边 | 进洞口 → 贯通面 | 215 | 113 | 112 | 267 | 398 |
贯通面 → 出洞口 | 233 | 156 | 95 | 296 | ||
结果可知,未加测陀螺边时,横向贯通误差为683mm,加测8陀螺边(每间隔7km加测一条陀螺边)后,贯通误差预计值为398mm。
六、结论
陀螺全站仪(经纬仪)作为独立测定任意测线真北方位角的敏感型寻北定向仪器,不仅减小系统误差的累积,同时提高地下控制网的精度。
参考文献:
【1】《工程测量规范》(GB50026-2007)
【2】《铁路工程测量规范》(TB10101-2009)
【3】《高速铁路工程测量规范》(TB10601-2009)
【4】《水利水电工程施工测量规范》(SL 52-2015)
【5】《水利水电工程测量规范》(SL 197-2013)

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网 琼ICP备2021005105号



