库卡机器人(广东)有限公司
摘要:近几年,轮式机器人运行常见轨迹跟踪问题逐渐为人们所熟知,现有研究更倾向于以差速驱动机器人为主体,通过深入研究运动控制问题的方式,提出相应观点。本文同样以差速模型为研究对象,通过全局跟踪的方式,一方面,多角度分析预测控制算法,在模糊规则的指导下,实时调整控制律常见误差权值,随着AGV得到控制,跟踪设定轨迹的目标自然能够实现。另一方面,基于仿真实验,对设计所得算法是否有效且可行加以验证,并获得实证有效的结论。
关键词:轨迹跟踪;自主导航小车;模糊预测控制
前言:AGV是无人生产车间自动搬运物料所使用主要工具,只有智能AGV才能使物料被安全、快速且准确的搬运到特定位置,不受外界环境干扰。要想确保处于运行状态的AGV能够自动探索外界环境并选择最优路径,对物料搬运所设定轨迹进行跟踪,关键是围绕轨迹跟踪展开分析,可以说,轨迹跟踪是否准确,通常会给AGV搬运任务完成速度和质量带来直接影响,本文所讨论项目的价值有目共睹。
1自主导航小车运动模型
有关人员对现有研究的内容进行了整理,分别指出了研究的优势与不足。例如,国外某学者基于跟踪系统对应误差模型,对控制律进行了设计,但设计律只能做到局部跟踪,其他学者以全局跟踪控制为最终目的,将动态反馈所获得指数收敛作为主要依据,对跟踪控制律进行了设计,即便如此,该设计仍有制约控制效果的因素存在,即奇异点,另外,控制器维数远超出合理范围。此后,国内学者以上述研究为依据,创造性的提出了一维控制器,旨在使系统不存在奇异点,但系统对模型角速度有极为严格的要求,在经过反复试错和改进后,差速驱动AGV应运而生,这也是本文所研究的重点。
为了降低研究难度,有关人员基于AGV、工作空间,对坐标系进行了建立,而用来表示跟踪轨迹的公式为 。随后,基于工作空间坐标系,对AGV坐标系原点加以表示,坐标系X轴和原点的夹角,便代表AGV的位姿。将差速驱动AGV运行速度设定为
。随后,基于工作空间坐标系,对AGV坐标系原点加以表示,坐标系X轴和原点的夹角,便代表AGV的位姿。将差速驱动AGV运行速度设定为 ,在AGV按照预定速度对预设轨迹进行跟踪的过程中,有关人员仅需对AGV驱动轮速度加以控制即可。
,在AGV按照预定速度对预设轨迹进行跟踪的过程中,有关人员仅需对AGV驱动轮速度加以控制即可。
2关于轨迹跟踪的模糊预测与控制分析
2.1确定导航系统
QR码属于矩阵二维码,组成元素以编码区域、功能图形为主,任意QR码均对应完全相同的三个探测图形,用来对位置进行探测,如图1。

图 1 QR码探测图形
每个图形都可以被分解为三个完全重叠的正方形,由于QR码遇到相似图形的几率极低,因此,基于QR码识别视场往往具有理想的速度和精确度,有关人员能够凭借QR码,对视场符号方向及所处位置加以确定[1]。
本文研究AGV需要往返于多个站点,运行轨迹以直线和转向为主,站点利用QR码为AGV导航,先由车载摄像头对QR码进行采集,通过计算的方式,判断站点航向角、横纵位置是否存在误差,再酌情修正误差并进行站点转向,事实证明,这样做可使AGV得到理想的导航控制效果。但要注意一点,实际采集图像以真彩图为主,要想减弱外界光线所带来干扰,保证该算法始终能够表现出良好的效率及成功率,关键是将真彩图转化成相应的灰度图像。基于此,在实验正式开始前,有关人员便对采集所得图像进行了阈值处理,确保初始图像被尽数转化成为实验所需灰度图像。而决定阈值处理有效性的因素为初始阈值,反复尝试所得结果表明,将阈值除湿值设定成120,可使算法表现出理想的解算效率及成功率。
2.2估计小车位姿
车轮和地面的运动状态为相对运动,因此,AGC在某些时刻极易出现预设位姿与实际位姿不符的情况,而本文所研究运动控制项目被提出的初衷,便是以车载传感器为依托,根据检测外界环境、运动状态所得结论,对AGV进行自定位,在此基础上,参考目标位置和当前位姿,通过实时调整控制量的方式,达到轨迹跟踪的目的。由此可见,位姿估计是极为重要的环节。
在估计小车位姿时,有关人员先要确定状态变量,而状态变量的计算公式为:


在式中, 代表控制周期内左驱动轮转过角度,
代表控制周期内左驱动轮转过角度, 代表右驱动轮转过角度,
代表右驱动轮转过角度, 代表AGV车体实际角速度。
代表AGV车体实际角速度。
对测量数值加以确定的公式为:

在式中, 代表控制周期内左轮编码器脉冲增量,
代表控制周期内左轮编码器脉冲增量, 代表右轮编码器脉冲增量,
代表右轮编码器脉冲增量, 代表陀螺仪
代表陀螺仪 值。
值。
此时,可被用来表现AGV状态的方程为:

在式中, 代表状态转移阵,
代表状态转移阵, 代表输入矩阵,
代表输入矩阵, 代表系统干扰。
代表系统干扰。
由此可见,量测矩阵适用公式为:

另外,运动预测控制也需要引起重视。研究表明,地面和车轮的关系是非完整约束,在AGV处于运动状态时,其位姿出现偏差的情况难以避免,越长的移动距离,通常对应越大的位姿偏差,这便是运动精度无法达到预期的主要原因。这也间接证明了运动控制需要以运动轨迹为依据,对运动控制量进行实时调节,确保跟踪轨迹和设计轨迹完全重合。要想使所设计系统发挥出应有作用,有关人员还要明确以下内容:其一,运动控制器强调基于设计路径进行参考输入,将测得位姿视为反馈信号,确保运动控制量能够得到准确输出;其二,预测控制的本质是以系统模型为基础,通过滚动优化、多步预测和反馈校正的方式,达到控制的最终目的,其优势主要表现为鲁棒性佳、对模型精度所提出要求相对宽松。
2.3模糊预测控制
2.3.1设计方案
研究表明,不同控制分量给AGV带来影响大致相同,因此, ,由此可见,AGV跟踪设计轨迹的效果,通常由q值决定。在不同工作点间运动的AGV,其轨迹点无需和位姿一一对应,这也给有关人员提供了全新思路,即:根据目标点距离、跟踪轨迹精度,对q值加以调整,保证AGV能够平稳且迅速的到达相应目的点。
,由此可见,AGV跟踪设计轨迹的效果,通常由q值决定。在不同工作点间运动的AGV,其轨迹点无需和位姿一一对应,这也给有关人员提供了全新思路,即:根据目标点距离、跟踪轨迹精度,对q值加以调整,保证AGV能够平稳且迅速的到达相应目的点。
在实证检验时,有关人员发现目标点距离、跟踪轨迹精度等概念均十分模糊,根据模糊概念调节q值,其精确度往往无法达到预期。在对多方因素加以考虑后,有关人员决定利用模糊集理论对模糊不确定的问题进行解决,简单来说,就是以ti时刻AGV位姿和控制位姿所存在误差为依据,确保q值能够得到实时且精确的调整[2]。图2为本项目所设计控制器的结构。
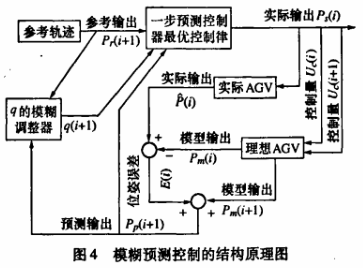
图 2 模糊预测控制结构
2.3.2确定规则
用来对q值进行调整的调整期,其输入量及输出量的数量往往相同,以三个为最佳,这是因为输入模糊集的数量和输入量的数量为正相关,一旦输入模糊集数量大幅增加,调整器适用调整规则就会变得更加复杂,这并不利于日后工作的开展。有关人员以精简调整规则为最终目的,先将模糊集成员数量定为七个,随后,按照绝对值对其他控制参数进行了等级划分,为仿真实验的开展提供便利。
2.3.3实证检验
出于对仿真分析是否正确加以验证的考虑,有关人员基于预测控制、模糊预测控制设计了相应的仿真实验。该实验要求AGV以每分钟30米的速度,由起点按照设定轨迹匀速向目的地运动,在此过程中,有关人员分别利用预测控制、模糊预测控制,对处于运动状态的AGV加以控制,并得出图3的结果[3]。

图 3 轨迹跟踪曲线对比
实证检验表明,模糊预测控制具有更快的跟踪速度和更理想的跟踪稳定性。这是因为预测控制的预测内容,主要是AGV即将进行的运动,虽然其具有良好的控制实时性且计算难度低,但由于仅能对较短的时域进行预测并控制,因此,动态稳定性始终无法达到预期。模糊预测控制的出现,使预测控制的不足得到了有效弥补,无论是理论分析,还是实证检验,均表明该法可行且有效,利用其控制AGV运动,通常能够获得符合FMS所提出要求的精度。
结论:通过上文的分析能够看出,预测控制特点体现在反馈校正、多步预测和滚动优化等方面,随着预测控制策略被引入,系统动态行为对应信息均可得到充分利用,其运行可靠性及稳定性,通常能够出现较为显著的提高。由此可见,要想使AGV发挥出应有作用,通过轨迹跟踪的方式,将物料准确而高效的运输到相应区域,对其进行模糊预测控制是必然选择。希望该项目能够给其他人以启发,为日后研究工作的开展提供帮助。
参考文献:
[1]范朝辉,石宏,陈其志.一种基于SLAM技术的智能导航小车的设计[J].机械研究与应用,2019,32(06):119-122.
[2]魏权利,李莹莹,何爱欣.九轴陀螺仪在AGV自主导航中的应用设计[J].计算机测量与控制,2019,27(10):209-213.
[3]罗志锋,王志刚,陈易新,等.激光测距传感器在自主导航小车中的位置标定[J].激光与光电子学进展,2017,54(06):286-293.
作者简介:文喆(1992年10月)性别:男;民族:汉族;籍贯:宁夏回族自治区,银川市;学历:研究生;研究方向 物流移动机器人。

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网 琼ICP备2021005105号



