1. 华北理工大学电气工程学院 2. 华北理工大学冶金与能源学院
摘要:
在这个信息时代,为了满足人们各种需求,促进了机器人的诞生。从刚开始为了工业生产而发展出的工业机器人,到现在的AI机器人,机器人在各种行业都迅速的发展。工业、农业、服务业等等行业促进机器人向着更加智能化的方向发展,所以对于机器人的研究也更加的火热化。机器人视觉伺服控制是机器人领域重要的研究方向之一,它的研究对于工业生产,航天领域的发展尤为重要。本文将论述机器人的发展趋势和现状,对于机器人的视觉伺服系统也将进行探讨,阐述串联六自由度机器人的坐标系问题及基于图像的机器人视觉伺服系统,对机器人的未来发展作出分析。
关键词:机器人 ;工业机器人; 视觉伺服系统;
前言
1960年,第一个机器人在美国被发明出来,智能机器人的技术快速受到各个国家的重视并且得到了飞速发展。我国于1972年开始研究工业机器人, 80年代,机器取代了人类以前所从事的很多工作,通过对国外的先进机型进行研究,进行了机器人基础的各种系统研究,编制了我国工业机器人标准体系和十二项国标、行标。90年代开始对工业机器人进行研究和开发,建立了机器人研究基地和产业基地,经过技术的不断发展,我国已经成功研发出工业机器人关键部 位的核心组件,自主开发了具有专业性能的工业机器人,也形 成了一批生产能力的企业。现阶段我国机器人产业模式与“美国模式”卫。基本相当, 即采购与成套设计相结合。
工业机器人就发展前景而言,非常具有广延性。从未来的发展来看,预计未来至少在10 年到20年内,中国工业机器人的市场潜力 和产业规模都将持续增长。随着各项科学技术的不断革新,将推进工业机器人技术向着更广、更高层次发展, 更大程度的提高人类生产劳动力。目前有两个明显的发展趋势。使机器人智能化和尽可能的减小机器人的体积。
二、串联机器人结构和视觉伺服系统
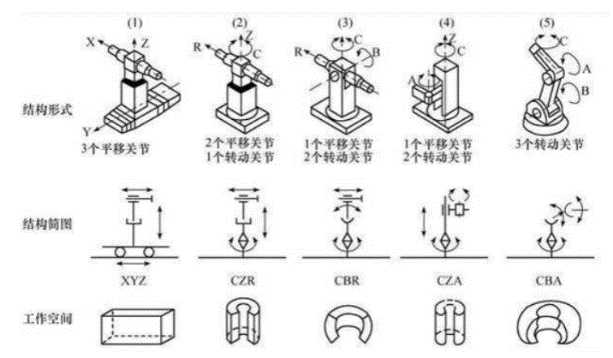
(1)串联机器人结构:
串联机器人是一个开式运动链机构,由一系列的连杆通过转动关节或移动关节串联而成,即机械结构使用串联机构实现的机器人。
如图:
(2)基于图像的视觉伺服系统的工作原理:
基于图像的视觉伺服系统,误差信号直接用图像特征来定义,以图像平面中的当前图像特征与期望图像特征间的误差量来设计控制器。由该误差信号计算出控制量,并将其变换到机器人运动空间中去,从而驱动机械手向目标运动,完成伺服任务。
如下图:
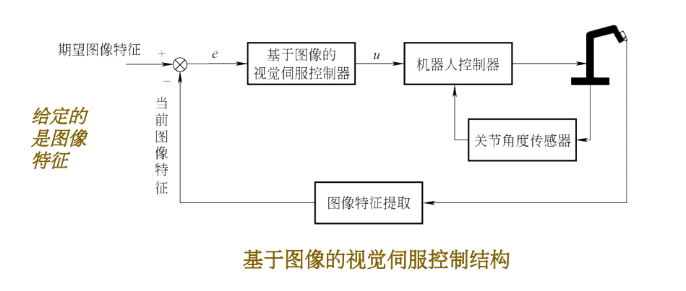
基于图像的视觉伺服控制系统:要依靠图像特征的雅克比矩阵,将图像特征参数变化与机器人位姿变化联系起来,图像雅克比矩阵可反映某个关节角附近机器人关节角的变化与图像特征变化间的关系。
机器人的内部传感器:位置传感器、角度传感器、姿态传感器;
作用:内部传感器用来确定机器人在其自身坐标系内的位置和姿态,测量角位移,速度,加速度,和力。
机器人的外部传感器:触觉传感器、距离传感器、听觉传感器;
作用:用于机器人本身相对其周围环境的感知和定位,外部传感器可使机器人能以柔性方式与环境互相作用。负责检验诸如距离和接近程度和接触程度之类的变量,便于机器人的引导和对物体的识别及抓取等。
三、总结与展望
如今的机器人行业很很有发展前景的,机器人向着更加智能化的方向研究,在国防、医疗、工业、服务业、教育等行业都有很好的发展前景。随着时代的发展。机器人也更加的普及化,在人工智能的方向上仍有很长的路要走,这就依靠我们这些时代的新生儿,投身于机器人技术的科学研究,为我国的机器人行业付出自己的努力,奉献自己。当然,机器人的知识,并不是局限于课本上的东西,还有很多专业的知识,需要我们自己去学习,然后自己加以实现。当然这是课本上所没有的,我们在机器人知识的道路上还有很长的道路要走。
参考文献
[1]曹泓浩.工业机器人的应用现状及发展趋势[J].科技风,2019,(5):145. DOI:10.19392/j.cnki.1671-7341.201905126.
[2]高冲.我国工业机器人现状及发展趋势研究[J].现代信息科技,2019,3(9):148-149,152. DOI:10.3969/j.issn.2096-4706.2019.09.058.
[3]吴宏杰,张跃辉,迟晓丽, 等.中国机器人的发展状况[J].电子制作,2013,(9):243-243.
[4]任丽,刘忠翔,李开阳, 等.工业机器人发展及应用研究[J].数码设计(上),2019,(4):178-179.
[5]李彬.我国工业机器人发展现状与措施[J].科技经济市场,2017,(3):194-195. DOI:10.3969/j.issn.1009-3788.2017.03.110.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网 琼ICP备2021005105号



