中交一航局第三有限公司 辽宁省大连市 116006
摘要:在复杂环境的城市建筑基坑监测中,基坑围护结构的水平位移和竖向位移是必测内容,传统的测量方法是平面和高程分开进行,用全站仪进行平面测量,比较两个周期平差计算得到的监测点平面坐标来计算水平位移变形量;用水准仪进行精密几何水准测量,比较两个周期监测点高程值来计算竖向位移变形量。虽然小角法、极坐标、平面自由设站等方法得到广泛应用,改善了监测效率,但是在通视条件差、作业环境复杂的情况下,外业工作量仍然很大,高程信息无法充分利用,监测工作效率较低。随着高精度的智能型全站仪的不断应用发展,其ATR、免棱镜测距等功能保证了测量的准确性和稳定性,可充分利用在监测中智能型全站仪平面测量过程中的天顶距和斜距信息,完成高程信息的采集。本文利用徕卡智能型全站仪,采用全站仪三维整体自由设站监测方法,对全站仪的水平方向值、天顶距和斜距三类观测值进行自由设站平差模型验证及其精度可靠性分析,并通过实例比较三维自由设站与传统方法两种计算方法的监测点成果,对该方法的可行性进行验证。
关键词:全站仪;三维自由设站;基坑监测
引言
全站仪的非接触测量已成为主要的监测测量手段之一,因为它具有快速测试速度、测量距离、对执行的干扰较小以及实现三维测量的能力等优点。对于几何图形而言,整个工作站的非接触测量比使用规则的常规测量更为严格。测试中存在许多错误的根源,许多研究人员对此进行了研究,并提出了改进的方法。全站仪自由测站精度分析;半自由站测量精度分析-全站仪;分析仪器精度造成的测量误差;认为测量站精度主要受距离测量误差影响,几乎与交会图纸无关;采用最小乘法的构型原理,提出了考虑已知点精度的算法;提出了测量高空边坡变形的坐标差观测方法;使用角度调整和程序补偿方法可进一步提高测量精度。目前提出的大多数方法侧重于分析和提高试验的准确性,而在隧道出口基坑工程中,从设备齐全的台站的三维测量中获得的数据易受波动的影响。本文通过分析3d测量的计算误差,为几何图形提供了一种改进方法。
1三维自由设站观测值的误差方程
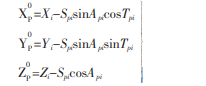
首先用基准点中任意的两个点为起算点,可计算仪器中心的近似坐标仪器中心为点P(XP,YP,ZP)。三维近似坐标根据三角函数计算得到。
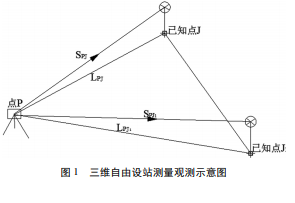
当三维自由设站测量观测3个及以上基准点时,存在多余观测,需要进行平差计算。观测值中有水平方向观测值、天顶距、斜距三类,假设在设站点P观测j点(XJ,YJ,ZJ),对水平方向观测值、天顶距和斜距观测值分别列平差值方程,其公式为:
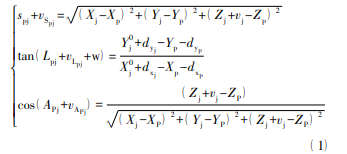
式(1)中![]() 分别为
分别为![]() 的改正数,
的改正数,![]() 为定向角。
为定向角。
2基于全盘位测量的自由设站方法
该过程简单有效。一种是三维紧密配合方案的后处理,比以前的方法更严格。在执行过程中,由于时间和工作时间都很紧,测量的数据通常需要现场解决方案来指导实时执行操作,因此第一个实时解决方案是实时操作的主要建立测站。但是,根据仪器附带的自由测站程序建立测站时,通常使用磁盘右侧的测量值;如果盘右测量存在指数差,盘右设站不能消除系统误差的影响。一种基于全局位置的自由站方法,即同时测量盘的左右,以消除垂直盘标差、2C差等不良系统的影响。基于全局位置的自由布置方法需要计算垂直圆盘的方向值、距离、垂直角度和指示器差,然后计算三维平差以确定场地坐标、坐标精度和方位角。主要想法是根据修正数重新计算权利迭代,直到权利更改为止,并导出已建立站点的三维调整以计算已建立站点的坐标、坐标精度和方位角。在自由研制完整的测站仪器过程中,测量得到的初始观测值为倾斜距离、水平方向和天顶距离。如果要选择的点的坐标是未知参数,则观测值和未知参数之间的关系是非线性函数。根据间接调整的原则,必须先计算拟确定点的近似坐标,以便于误差方程的输入。自由安装过程中的等待点是安装位置,下面详细介绍了安装位置的大致坐标计算。
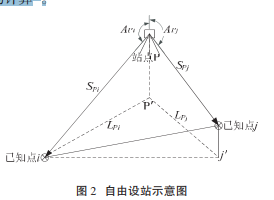
图2中,假设在点P架设全站仪分别观测i、j两已知点,观测值分别为斜距SPi、SPj,天顶距APi、APj,水平方向为LPi、LPj,∠Pij在XY平面的投影角为∠P′ij′,计算如式(2)
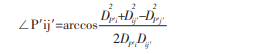 (2)
(2)
![]()
ij方向的坐标方位角计算如式(3):
![]() (3)
(3)
进而可计算测站点P到i方向的坐标方位角如式(4)为:
![]() (4)
(4)
最终,测站点P的近似坐标计算如式(5)
 (5)
(5)
由于自由测站通常有多个观测值,因此可以根据间接调整计算出这些测站的狭窄三维坐标。根据公式(5),场地精度主要取决于已知点的坐标精度、距离、水平角度和天顶距离的观测精度。由于已知座标的精确度是在建立台站之前确定的,因此在以后使用台站座标时,座标计算的精确度和精确度主要取决于观测距离、水平角度和天顶距离的精确度。根据海底隧道工程测量的规定,盘左观测与盘右观测之间的差为1mm,因此短距离观测精度较高有多种方法可以设置访问权限,以实现排序点的自动化,并确保所有数据都能正常工作,从而在站点中提供独特的结果。确定准入权的方法之一是公式(6):
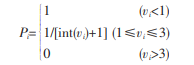
其中,![]() 表示已知点的设计值,K0i表示已知点的平差值。
表示已知点的设计值,K0i表示已知点的平差值。
3自由设站用于精密设备安装测量的可行性分析
当前,在工业设备安装范围内,全站仪的建站方法主要有:已知点后视坐标法、方位角后视法和后方交会法,其中后视法主要有::已知点后视坐标法、方位角后视法这些方法受到建筑环境的严重影响,设站站效率和精度低,难以满足施工测量的精度要求。自由测站后方交会法通过利用高精度控制网和全站仪的自由设站,显然可以满足高精度的测量要求。考虑到需要获取目标点的三维坐标,本文采用后方交会建立三维自由设站。分析自由站安装精密设备的可行性,文中将系统地研究自由站的数学模型。该项研究的基本思想是,根据所建立的场地与已知控制点之间的倾斜距离、水平方向和天顶距离(由整个站仪器测量),计算三维误差方程,并根据所建立场地的平面度差计算三维坐标、方向角和精度。
结束语
本文从基坑监测的工程实践出发,对全站仪三维自由设站的数据模型进行分析,并结合工程实例,进行三维自由设站的精度评定,并通过与传统方法进行结果对比,验证了结果的准确性。该方法仪器设站灵活,充分利用了全站仪的高程信息,减少了几何水准的工作量,提升了效率,可应用于工程实践。
参考文献
[1]荆海峰,王力,杨文锋,彭逸凡.自由设站法在点云拼接中的应用[J].测绘与空间地理信息,2018,40(01):94-96+98.
[2]杨思山,刘成龙,唐恩奎,廖高毅.全站仪半盘位自由设站测量的精度分析[J].铁道科学与工程学报,2018,14(01):26-30.
[3]张志伟,王宏涛,王羽.自由设站及无定向导线观测法在沟道测量中的应用[J].测绘通报,2018(S1):202-204.
[4]王洪.全站仪自由设站法精度分析及应用研究[J].测绘与空间地理信息,2018,39(04):82-85+88.
[5]朱洪涛,徐宜敏,吴维军.全站仪免置平自由设站及其测量方法[J].铁道标准设计,2018(06):25-28.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网 琼ICP备2021005105号



