桂林电子 科技大学 广西 桂林 541000
摘要:在一些恶劣环境和特殊场景中,需要对周围环境进行实时监控。而传统的监控摄像头受限于移动性、传输性等,难以完成复杂目标的监测任务,而无线视频小车能够解决该问题。本项目以STM32F103单片机为核心控制器,辅以电机驱动模块、电源稳压、摄像头、WiFi模块等设计模块,研究设计一台WiFi视频监控小车。WiFi视频监控小车信号强度高,传输距离广,穿透力强,可实现360°全角度视角检测,搭配手动或自动调焦的感光高清摄像头。同时,可通过上位机控制软件实现其前进、后退、转弯及视频回传、实时显示等功能。
关键词:自平衡小车 WiFi视频传输 STM32F103单片机
一、硬件设计
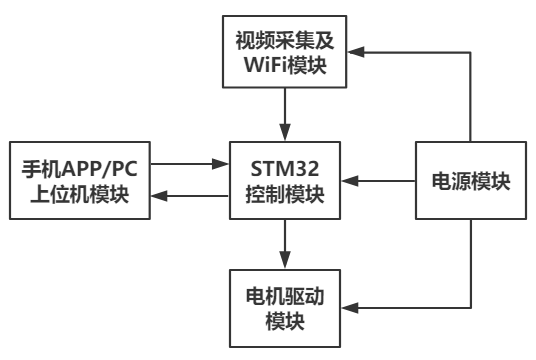
本项目硬件部分的设计采用模块化、结构化的方式,分别设计了电源模块、视频采集及WiFi模块、STM32控制模块、电机驱动模块、手机APP/PC上位机模块,构成的系统框图如图1所示。
(1) STM32控制模块
本产品使用STM32单片机作为主控制器,控制其它模块的运行,处理数据,将采集到的视频信号传递给上位机模块,并进行信息交换。
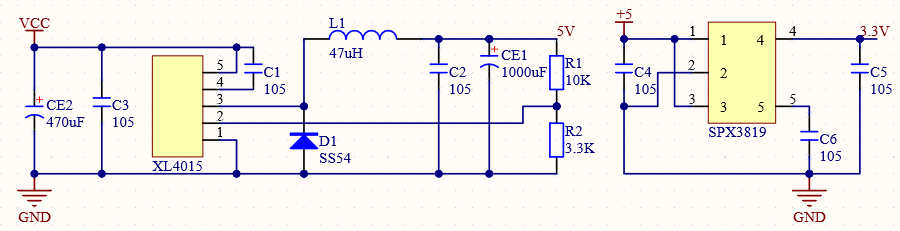
电源模块
如图2所示为电源模块,使用XL4015和SPX3819芯片,分别可输出5V和3.3V电压,为电机、主控制器以及无线路由器系统提供电源。
手机APP/PC上位机模块
上位机软件控制监控小车做出前后左右移动、视频信号采集等一系列指令动作,解决传统的视频监控需要采用有线网络而导致网络布线复杂、造价高的问题。
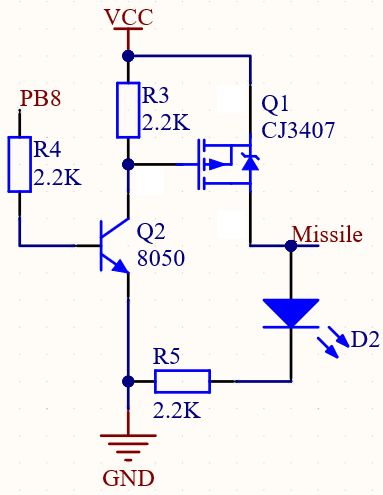
电机驱动模块
如图3所示为电机驱动模块。当PB8输入高电平时,NPN三极管8050导通,集电极为低电平,PMOS管导通,从而驱动电机。车轮的转动与速度的改变主要通过电机驱动芯片与PWM脉冲编码输出单元来实现。
视频采集及WiFi模块
本项目视频采集模块中的感光高清摄像头分辨率可达640*480P,可手动、自动调焦。高清摄像头对周围环境进行视频监控,路由器将摄像头获得的视频信号传输到上位机模块,将采集的视频信号无线传递到控制界面并显示,进行实时监控。
软件设计
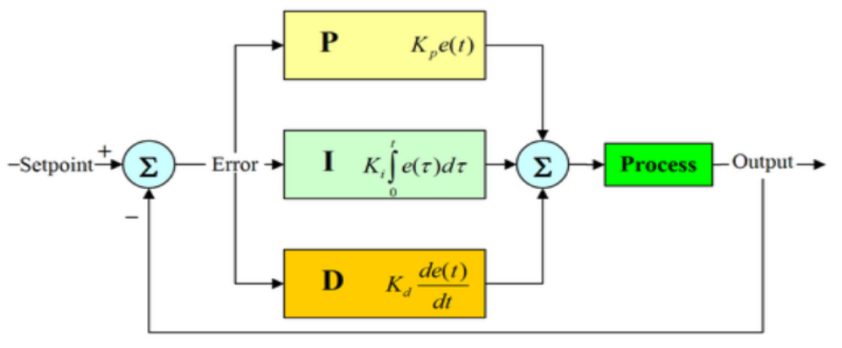
PID 算法解析
PID是一种线性控制器,运用数学计算,使小车保持平衡,结构简单、稳定性好。其结构框图如图4所示。
在本项目中,平衡车的PID算法公式为:

其中 是PID的计算输出,可以视为输出的轮子的转速,
是PID的计算输出,可以视为输出的轮子的转速, 是小车当前角度与平衡角度的差,
是小车当前角度与平衡角度的差, 是轮子的当前转速,
是轮子的当前转速, 是小车的比例参量,
是小车的比例参量, 是小车的微分系数。
是小车的微分系数。
PWM控制原理
PWM是通过频率可变,脉冲度可调的脉冲信号。本项目采用PWM来控制电机的转速。当PWM的占空比越大时,平均电压越大,电机转速就越高。反之占空比越小,电机的平均电压就越小,电机转速降低。
卡尔曼滤波算法
卡尔曼滤波是一种最优估计算法,使用系统输入和输出的数据求解系统的状态方程,从而对线性系统进行状态判断。在本项目中,小车在运行过程中常常会受到噪声干扰,因此可以用卡尔曼滤波算法估计系统的状态。同时由于它便于计算机编程实现,因此小车现场采集到的数据可以进行实时的更新和处理,得到更加准确清晰的图像。
加速度平滑算法
直接从模块中读取的加速度是不能直接用于计算的,它的数据中有跳变,有不稳定的数据存在,为了使得到的加速度数据更稳定,需要对加速度数据进行一个简单的处理。因此需要一个函数来让加速的数据变得更加平滑和稳定。
本项目用数组来存放之前读取的数据。新来的数据放在数组的末尾,之后把这个存储数据的数组内的数据进行求和、求平均便可以得到我们想要的稳定数据。
三、项目创新点
1.该产品采用PID算法,为自平衡机器人,小巧灵活,特别适用与空间狭窄的环境。
2.该产品摄像头可手动或自动对焦,拍摄清晰,同时引入卡尔曼滤波算法,使画面更加稳定。
3.使用2DBi WIFI天线,实现无线通信,WiFi视频监控小车可实现对各种环境的监控,解决传统的视频监控需要采用有线网络而导致网络布线复杂、造价高的问题,并根据监控要求控制小车的移动、传输视频信号。
4.摄像时采用防抖技术,小车运动时引入加速度平滑算法,保障画面平稳。
5.使用移动设备可控制小车实现前进、后退、转弯并回传视频等功能,使用方便。探测监控危险地方时,基于无线网络进行远程控制的可移动视频监控小车恰好能够解决传统的视频监控存在的问题,同时保证了工作人员的人身安全。
参考文献
[1] 李婕.基于 STM32 的智能小车的制无线视频监控智能小车设计 [M].兰州理工大学出版社 ,2014.48-49.
[2] 唐雄燕.宽带无线接入技术及应用:WiMAX 与 WiFi――现代通信网实用丛书 [M]. 电子工业出版社 ,2006.55-56.
(广西大学生创业训练项目编号:S202110595300X)

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网 琼ICP备2021005105号



