宁夏京能宁东发电有限责任公司,宁夏银川, 750400
摘要:电厂氢站区域因生产的氢气具有易燃易爆的性质,传统人工巡检伴随着危险系数的重要问题。同时近些年国家要求建设新时代智能电厂,应用智能化技术减少传统人工作业的风险及减少人员成本、提高生产效率,遂本文根据电厂氢站日常巡检工作需要,设计了一款智能防爆巡检机器人,在具有高度自主智能化的同时兼具安全防爆,可减少氢站人工巡检风险及人力资源投入,保证电厂氢站工作安全有序进行。
关键字:巡检机器人;智慧电厂建设:防爆技术应用;机械结构设计
近期全国多地限电等话题再次引起了我们的关注,电力工业是国民经济支柱产业,充足的电力生产是保障我国市场经济及工业生产稳定基本需求。但是由于今年全球疫情影响,国外疫情控制水平较差,相比之下中国疫情控制较好,从而带动国外大批量采购中国产品,随之而来的是工业用电的大幅提升。因此提高电厂生产效率,提升电厂经济投入及能源转换比,促进能源和信息深度融合,构建“智能发电、智慧电厂”成为发电企业未来的转型之路,也是提升管理、提升市场竞争优势的创新变革举措,对于实施供给侧改革、创新驭动发展战略也有着重要意义。
在智能电站建设中,为了克服传统人工作业的诸多安全隐患及减少成本,应用智能化技术,减少人员、提高效率是必然的措施,在电厂氢站区域应用智能巡检机器人,可有效规避安全风险,也减少高危岗位的人力成本投入,提高氢站运行的安全性和经济性,具有一定的现实意义。
(一)电厂氢站基本情况
应用电厂为X集团发电有限公司,配备2 X 660MW发电机制氢站室外储罐区,发电机氢气容积为2 X 110Nm3,额定氢压0.5MPa,漏氢率(补氢量)G 2 X l ONm3/天。制氢系统采CNDQ-10/3.2型水电解制氢装置。电解槽为压滤式双极性结构,采用将380V交流电经可控硅控制装置变为56V直流电供给方式,电解液采用氢氧化钾。室外储罐区由4个氢气储罐和1个压缩空气储罐组成。
(二)电厂氢站业务需求
该电厂氢站平时巡检内容主要有四大部分,首先是两个框架系统,框架一系统要针对氢氧分离器的运行温度和调节阀稳定状态进行巡检,然后是框架二系统,检查阀门管道等是否发生漏气现象,第三部分补水系统则是监测蒸馏水箱水位,最后是监测仪用气系统是否漏气。
(一) 机器人工作原理
为实现机器人巡检防爆功能,需考虑到巡检机器人工作原理,即通过巡检轨道的行进完成水平位移拍摄,随后通过伸缩杆的伸缩与检测云台翻转完成整个区域的巡检工作,而防爆功能则只需要设计上附加充电仓、防爆电动伸缩杆与电池电气防爆仓即可。因此本设计主要由三部分组成,分别是行走与定位机构、电池电气防爆舱与云台升缩旋转机构,分别负责机器人轨道行进,电池与电气器件收纳与防爆,摄像监测等功能。
机器人系统功能分解
根据上面已经介绍过的业务需求,为全面良好的完成四大部分的检测,该氢站巡检机器人系统主要包含的功能有人脸识别、安检检测、检修工具条码识别、氢气泄漏检测、设备振动检测、设备温度检检测、温湿度检测、噪音检测、报警联动、就地表计识别、红外温度检测、视频采集分析、双向语音交互。巡检系统功能分析如下图:
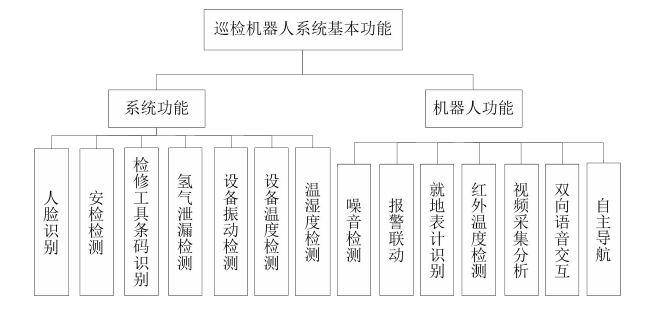
图1 巡检系统功能分解
(三)机器人防爆安全配置
因氢气易燃易爆,巡检机器人按照氢区防爆设计,防爆功能针对充电仓、电动伸缩杆与电池电气进行设计,其他系统内的功能部件按照适用的要求进行选型适用即可。
(一)氢站智能巡检机器人的硬件设计
巡检机器人本体包括可扩展轨道机器人底盘结构和搭载设备,可扩展轨道机器人底盘结构包括行走机构、动力及传动机构和其他机械部件。机器人整体按照防爆结构设计,整体防爆等级满足氢站使用需求,机器人控制硬件系统主要包括:机器人微控制器、电源模块、电机驱动模块、摄像头模块、数据存储模块、该控制系统采用嵌入式工控机,具有可靠性高、体积小、能满足隧道的高低温环境;机器人本体端由微控制器控制电机驱动模块、环境监测模块、数据储存模块、电源模块及摄像头模块,完成各项功能的指令处理和数据传导,远程控制端采用服务器电脑,通过无线通讯模块接受到机器人本体端发送的数据与监控图像信息,了解现场检测到的温度与湿度和现场情况。
(二)氢站智能巡检机器人的软件系统设计
该巡检机器人软件系统分别有本体嵌入软件与远程控制软件,机器人本体嵌入式控制软件的作用主要负责对巡检机器人自身控制、诊断、上位机通信等功能进行控制。本体嵌入式控制软件首先需要对底层配置进行初始化,例如单片机时钟。随即对应用层展开初始化,包括上位机通讯、伺服电机作业、各种传感器的实际数据等等。最后进入到循环程序,对处理函数不断执行、命令执行函数、通讯处理函数。采用嵌入式方案,是避免采用工控机方案的不可靠问题,避免机器人失控。
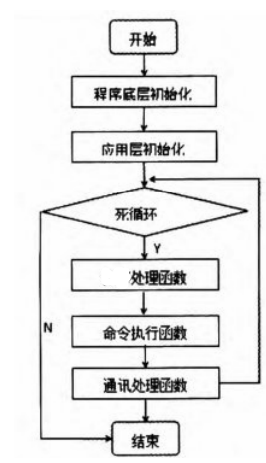
图2 本体嵌入式控制软件程序流程
巡检机器人的上位机测控软件在VisualStudio 2017软件中使用QT开发框架编写,并根据巡检作业要求制定上位机软件界面,当系统启动时将会根据机器人本体通讯系统发送来的信息确定机器人当前定位,并结合参数选择发送巡检指令,或发送具体定位检查要求指令,同时整理检测信息上报至系统。
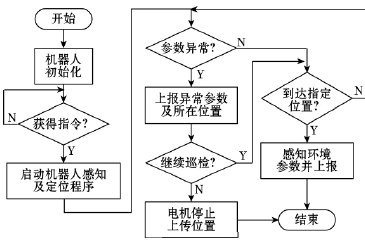
图3 机器人上位巡检程序流程图
本文针对电厂制氢站巡检工作的情况,针对氢站巡检的四个部分,氢氧分离器的运行温度和调节阀稳定状态、阀门管道等漏气现象、蒸馏水箱水位监测以及用气系统漏气,设计了一款智能化自动防爆巡检机器人,可有效降低传统人工作业的诸多安全隐患及减少成本,帮助电厂减少人员成本投入、提高效率,更好的响应国家智能电站的建设要求,完成“无人电厂,少人管理”的智慧电厂建设目标,以更高的生产效率为社会主义建设保驾护航。
参考文献:
[1]刘标.防爆巡检机器人在天然气分输站的应用[J].化工管理,2021(21):196-198.
[2]黄良炆. 四轮独立控制防爆巡检机器人路径规划研究[D].大连理工大学,2021.
[3]黄山,吴振升,任志刚,刘弘景,桂媛.电力智能巡检机器人研究综述[J].电测与仪表,2020,57(02):26-38.
[4]朱宇昌,李军伟,张树生,裴文良,孙宁.防爆轮式巡检机器人设计及应用[J].制造业自动化,2019,41(02):39-40+51.
[5]曹现刚, 井下巷道悬线巡检防爆机器人. 陕西省,西安科技大学,2018-08-01.
[6]许丽,石伟,方甜.巡检机器人中的指针式仪表读数识别系统[J].仪器仪表学报,2017,38(07):1782-1790.
[7]何缘,吴功平,肖华.高压输电线路巡检机器人机构设计及运动学分析[J].高压电器,2016,52(06):61-68.
[8]王凯. 变电站巡检机器人关键技术及系统的研究与实现[D].电子科技大学,2015.
[9]赵坤. 变电站智能巡检机器人视觉导航方法研究[D].华北电力大学,2014.
[10]李正. 高压输电线路自主巡检机器人的研究[D].上海大学,2013.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网 琼ICP备2021005105号



