深圳鹏锐信息技术股份有限公司 广东省深圳市 518055
深圳鹏锐信息技术股份有限公司 广东省深圳市 518055
浙江大唐国际绍兴江滨热电有限责任公司 浙江省绍兴市 312366
浙江大唐国际绍兴江滨热电有限责任公司 浙江省绍兴市 312366
摘要
目前大多数振动监测系统均采用有线的ICP 压电加速度传感器采集机械设备的振动,对现场的布线和安装有着较高的要求和成本。本设计了一种基于最新MEMS 加速度传感元件和LoRa无线通信的振动传感器,可采用磁吸的方式吸附在机械设备表面振动监测的方案。
经过测试和实际现场使用表明,设计的振动传感器技术性能指标满足对电动机和汽轮机振动检测要求,能应用于电动机和汽轮机的在线故障的监测和故障诊断。
关键词:MEMS传感器;LoRa通讯;加速度;快速傅里叶变换
引言
现代工业生产过程中使用了大量的电动机,汽轮机,压缩机等往复式机械设备,此类机械机器的不平衡、缺陷、紧固件松动和其它异常现象往往会转化为振动,引起其内部的机械性磨损、结构性疲劳,最终导致设备的结构损伤,缩短使用寿命,甚至引发生产安全事故。
工业现场基本都会在关键设备上装备故障诊断系统,由于该系统工程造价昂贵,调试使用繁琐,并无法实现便携式安装,很难大规模应用。现阶段大量的工业现场机械设备,使用便携式巡检仪进行人工测量与记录,由于人工记录周期长,主观性强,管理困难,安全性差等各种因数,也不是一种理想的方案。
随着传感器小型化,无线技术,低功耗技术,电池技术和物联网的发展,本设计针对性的实现了一种基于LoRa无线传输,MEMS加速度传感器和低功耗处理器等方案小型振动传感器。传感器可通过磁吸方式便捷的安装在被监测设备上,能对振动参数提供长期的指定周期的监测,并通过LoRa无线传输给网关设备,由网关设备LoRa网络进行管理并上传整理的数据到上位机,由上位机实现数据的展示报警和存储。
1硬件设计
1.1加速度传感器
实际应用中通常使用ICP压电式加速度传感器来对振动信号进行拾取,其具有噪声小,灵敏度高,配套成熟等特点成为振动传感器领域的主流。但随着微机电系统(MEMS)技术的发展,同样具有压电式优点的MEMS加速度传感器不断被推向市场,MEMS传感器同时还具有带宽高,成本低,体积小,易集成等特点,迅速在振动监测中被大量应用,根据对实际参数的需求,本设计采用ADXL1002电容式MEMS单轴加速度传感器为敏感元件,经过相关计算,可满足现场对带宽,精度、测量范围和成本的要求。传感器的主要技术参数如表1所示。
表1 ADXL1002主要技术参数
检测范围 | 带宽 | 线性度 | 输出方式 | 工作温度 | 噪声 |
±50g | 0~11KHz | ±0.1% | 模拟量 | -40~125℃ | 25μg/√Hz |
1.2无线传输方案
现有主流的无线传输方案有,WIFI,ZigBee,蓝牙,LoRa等,这几种无线方案各有优势,适用的场合也各不相同,在本实际应用中,主要对工作频段,功耗,抗干扰,传输速度和距离等多个方面进行分析比较,选取最优方案。
表2 几种无线通讯技术的对比
| WIFI | ZigBee | 蓝牙 | LoRa |
频段 | 2.4G/5G | 2.4G | 2.4G | 470~510MHz |
功耗 | 高 | 低 | 超低 | 低 |
传输速度 | 超高 | 低 | 中 | 低 |
传输距离 | <100m | <100m | <50m | <5Km |
抗干扰 | 弱 | 中 | 较弱 | 较强 |
通过表2中几种无线通讯技术的对比,四种通讯技术的频段都属于ISM公共频段,无需单独申请许可证。其中WIFI的功耗较高,容易被干扰; ZigBee和WIFI抗干扰稍好,易于组网,但传输距离较短; LoRa有着抗干扰能力强,功耗低,传输距离大等特点,可大大减少现场网关的安装数量,同时本应用传输数据量较小,符合LoRa传输速度低的特点。因此LoRa无线方案最为合适此次场景需求。
1.3硬件总体方案
本设计采用软件滤波,积分并求均方根值的方案。此方案相比传统硬件方案有着电路结构更加简单,成本更低和功耗更低等优势,同时由于计算量较大,对计算处理器的要求也更高,设计中采用超低功耗,80MH主频,内置DSP和浮点计算单元的STM32L431为主处器。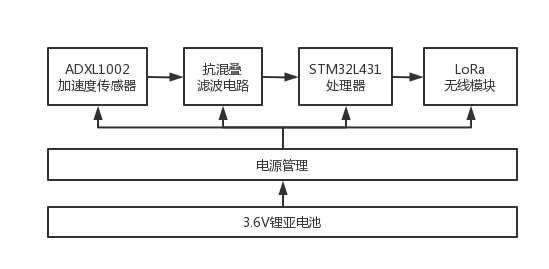
图1 硬件方框图
如图1所示,ADXL1002加速传感器输出的信号经过低通抗混叠滤波器的预处理,然后送入STM32L431的AD采样管脚进行数模转换,STM32L431的ADC支持16位硬件过采样,实际可将ADC分辨率从12位提高到14位左右,对信号采集的精度和分辨率有较高的提升。处理器对采样到的加速度数据进行滤波,FFT,积分,IFFT,RMS等一系列计算将得到有效的加速度,速度和位移结果,并通过LoRa无线传输给网关,由网关把多个传感器的结果数据整理传输给上位机进行存储,展示和分析等。
2算法与软件
2.1测量原理与算法
振动的测量有加速度、速度和位移三个参数,在实际工程应用通常根据应用的特点选取不同的参数作为主要参数。在图2中,对采样到的振动加速度信号进行FFT傅里叶变换得到加速度频谱;利用谐波信号的时-频关系,由振动加速度频谱得到速度和位移频谱,然后对振动速度频谱和位移频谱进行IFFT傅里叶反变换,得到速度和位移的时程曲线;再对速度和位移的时程信号求RMS值,就能获得振动的速度RMS和位移峰峰值2√2RMS。
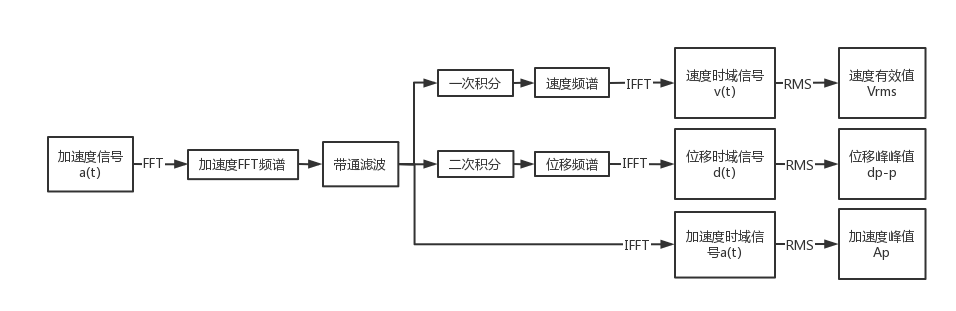
图2 振动加速度到速度和位移处理和计算过程
时-频换算关系:根据傅里叶逆变换的公式,加速度信号在任一频率的傅里叶分量可以表达为

式中:a(t)为加速度信号在频率ω的傅里叶分量;A为对应a(t)的系数;j为虚数√-1。对a(t)进行一次积分可以得到速度信号分量,即
 V
V
式中:v(t)为速度信号在频率ω的傅里叶分量;V为对应v(t)的系数;故一次积分在频域里的关系为

对a(t)进行两次积分可得位移分量,即

式中:d(t)为位移信号在频率ω的傅里叶分量;X为对应d(t)的系数;故二次积分在频域里的关系为

2.2 软件实现
本设计的软件部分如图3所示,主要包括信号采集、处理计算、无线传输和其他功能等四大部分。
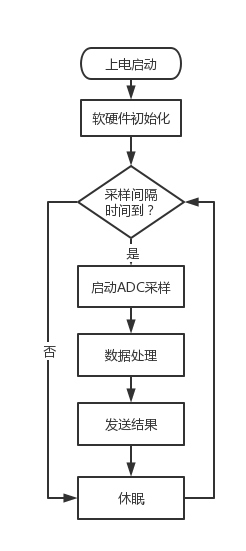
图3 传感器软件主流程图
1)信号采集:主要是STM32 通过ADC对输入的模拟信号进行高速采样,并通过DMA直接存储技术将采样数据保存到RAM中,待下一步计算时使用。
2)数据处理:对加速度数据的对应的算法进行程序的编写,如软件滤波,快速傅里叶变换,有效值计算等。
3)无线传输:振动数据的发送主要通过LoRa无线模块,即将处理后的数据按照规定的时间发送给网关。
4)其他功能:还包括一些故障报警处理机制,电池馈电监测采集,无线功能配置,和OTA在线升级等特殊功能。
3、实现与测试
本设计中的振动传感器通过磁吸的方式安装在标准振动校准台,设置一个80Hz加速度信号根据计算后得出的加速度,速度和位移的频谱图
图4 加速度时程与频谱计算(80Hz加速度)
图5 速度时程与频谱计算(80Hz加速度)
图6 位移时程与频谱计算(80Hz加速度)
由图5速度时程曲线和图6位移时程曲线可以看到,速度曲线被较好的还原,受到的频谱泄露的影响较小;经过二次积分,位移曲线受到频谱泄露影响也被放大,出现了一些明显的非线性趋势,是影响测量精度的一个重要因素。
实际结果测试中,将标准振动校准台分布设置到10Hz、100Hz、1KHz三个频率下测试得出的数据,
表3 振动传感器在10Hz,100Hz和1KHz情况下的测试数据
速度(mm/s)@10Hz | 位移(um)@10Hz | ||||
给定值 | 测量值 | 差值 | 给定值 | 测量值 | 差值 |
10 | 10.2 | 0.2 | 100 | 51.2 | 1.2 |
100 | 101.9 | 1.9 | 500 | 514.6 | 14.6 |
200 | 204.3 | 4.3 | 1000 | 1028.1 | 28.1 |
速度(mm/s)@100Hz | 位移(um)@100Hz | ||||
给定值 | 测量值 | 差值 | 给定值 | 测量值 | 差值 |
1 | 1.1 | 0.1 | 10 | 10.2 | 10.2 |
20 | 20.3 | 0.3 | 50 | 51.2 | 1.2 |
100 | 101.7 | 1.7 | 100 | 103.0 | 3.0 |
速度(mm/s)@1KHz | 位移(um)@1KHz | ||||
给定值 | 测量值 | 差值 | 给定值 | 测量值 | 差值 |
5 | 5.1 | 0.1 | 1 | 1.02 | 0.02 |
10 | 10.2 | 0.2 | 3 | 3.08 | 0.08 |
20 | 20.5 | 0.5 | 5 | 5.15 | 0.15 |
表3的实际测试数据可以看出,在10~1000Hz评率范围内可以实现3%的测量精度,满足使用时要求的5%测量精度。
4 结语
本设计采用了MEMS加速度传感器,LoRa无线传输加软件计算处理的方式实现了对振动参数的测量,该振动传感器具有电路结构简单,低成本,低功耗,体积小,准确度高,易安装,电池供电,内置数据处理等特点,在设备机械的振动检测和故障监测方面具有很大的应用前景。
此外本设计只能进行单轴测量,需要对同一设备进行多轴测量时需要安装多个传感器才能实现,可能会对现场的应用造成不便。但可参考本设计,将前端的加速度传感器替换为ADXL356,单轴采样与计算扩展为三轴采样与计算就能方便的实现三轴的测量。
参考文献:
[1]徐磊,房立清,齐子元,等.基于MEMS 加速度传感器的振动加速度测量系统设计[J].仪表技术与传感器,2019(2):18-21,25.
[2]秦丽,王孟美,何蕴泽,等.振动环境下MEMS 加速度计的可靠性评估[J].传感技术学报,2
016, 29(5):670-674.
[3]田立勇,吴境林.基于Zoom-FFT的排污泵故障诊断与分析[J].机械设计与研究,2018,34(3):171-174.
[4]郑浩.LoRa技术在低功耗广域网络中的实现和应用[J].信息通信技术,2017(1):19-26.
[5]赵静,苏光添.LoRa无线网络技术分析[J].移动通信,2016,40(21):50-57.
[6]杜亮.煤矿机电设备振动在线监测装置的设计与应用[J].机械制造,2019,57(8):18-19.
[7]李文军,乐小琴,沈晓昱,等.工业仪表无线数据采集系统的设计与实现[J].自动化仪表,2012,33(4):27-29.
[8]吴琼,袁建英.一种新的分布式自适应抗同频干扰技术研究与实现[J].计算机应用研究,2014,31(8):2437-2440.
[9] 张亚洲,张超,王保锐,等.实时频谱分析仪中并行FFT算法的FPGA 设计[J].单片机与嵌入式系统应用,2016,16(05:23-26.
[10] 陈曾平,吴巨红,宿绍莹,等.宽带实时频谱分析技术及其应用[J].信号处理,2012,28(02):151-157.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网 琼ICP备2021005105号



