佳木斯大学机械工程学院(黑龙江佳木斯 154007)
摘要:设计了一种基于遥感技术的自动分类垃圾桶,采用多种传感器进行垃圾分类。传感器将对湿度的感知信号反馈给微型处理器STM32F104,处理器控制电机使相应湿度的垃圾进入对应的存储区域。垃圾桶设计了可更换桶身的结构,同时桶盖和门阀的开启都由电动机驱动控制。垃圾桶移动底盘利用由万向轮和两个驱动轮组成,使得垃圾桶可全方位进行移动,并可自主避障。该垃圾桶提高了垃圾分类效率,节约了时间,使垃圾分类向机械化、智能化发展。
关键词:垃圾桶;自主避障;自动分类
Abstract: An automatic classification trash bin based on remote sensing technology is designed, and a variety of sensors are used for garbage classification. The sensor feeds back the humidity sensing signal to the microprocessor STM32F104, and the processor controls the motor to make the garbage with the corresponding humidity enter the corresponding storage area. The trash can is designed with a structure that can replace the barrel body, and the opening of the lid and the door valve are all driven and controlled by a motor. The mobile chassis of the trash can is composed of universal wheels and two driving wheels, so that the trash can can be moved in all directions and can avoid obstacles autonomously. The garbage can improves the efficiency of garbage classification, saves time, and makes garbage classification mechanized and intelligent.
Key words: trash can; Autonomous obstacle avoidance; automatic classification
近年来,随着我国的经济高速发展,人们生活水平不断提高,但随之而来的便是大量垃圾的产生以及部分可回收垃圾的浪费。根据不完全统计,我国人均生活垃圾年产量为440kg,并以每年8%-10%的速度快速增长(图1)。这将对环境保护造成巨大的压力。对垃圾进行合理的分类是解决资源浪费、减少环境污染的重要举措。据统计,垃圾分类可以使人均生活垃圾的三分之二得以回收或再利用,减少焚烧或填埋所造成的环境污染。2019年7月1日上海市率先出台了《上海市生活垃圾管理条例》,进行垃圾分类投放的试点运行,垃圾分类势在必行。运用该智能垃圾桶可以大幅度节约人们的垃圾分类时间,提高分类效率,垃圾车直接分类回收不同区域内的垃圾,避免集装回收的二次混合。该款基于自动控制原理的垃圾桶采用多种传感器进行垃圾分类,体积小巧轻便,只需将垃圾放入此垃圾桶便能自动进行垃圾分类。该款自动分类垃圾桶同时还具备红外遥控功能,用户可使用遥控器来操控垃圾桶的移动路线。垃圾桶将垃圾自动分类与智能化轨迹避障相结合,提高了垃圾桶的智能化程度。
一、智能分类垃圾桶的结构组成
该智能分类垃圾桶主要由垃圾桶盖、门阀、支撑层、转向盖、转动轴、垃圾桶身和移动底盘组成。垃圾桶阀门处连有重力传感器,能感知是否有垃圾投入,转向轴与转向盖相连如图2所示,其上连有湿度感应器,垃圾桶内部含有三个封闭区域,分别盛放干、湿以及其他垃圾,移动底由万向轮和两个驱动辅助轮组成如图3所示。
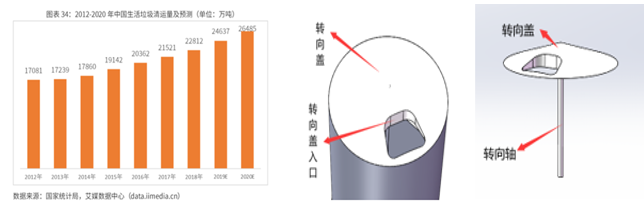
图1 2012-2020年中国生活垃圾清运量 图2 转向盖、转向轴与转向盖入口
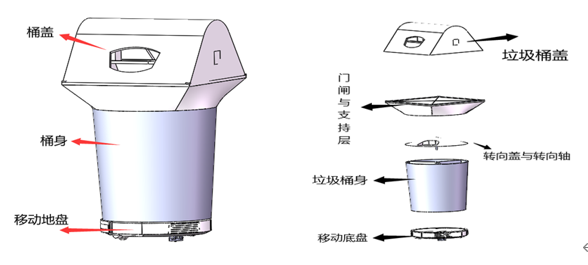
图3 垃圾桶分解图及垃圾桶样图
二、工作过程及工作原理
1.垃圾分类工作过程及原理
垃圾投入垃圾桶后落到闸门上,重力传感器检测到闸门上的重力感应,将信号反馈与给单片机STM32F104;湿度传感器对投入的垃圾进行湿度判断,然后将所得湿度值信号反馈给微型处理器STM32F104,微型处理器控制电机的转速从而带动与转向杠相连的转向盖转动一定的角度,令投入的垃圾到达存放该种类型垃圾的区域上方;这时闸门在重力传感器的控制下打开,垃圾掉入指定区域,从而完成了垃圾在垃圾桶内的一次分类流程。
2.垃圾桶移动过程及原理
自动分类垃圾桶的移动底盘使用由两个万向轮和两个驱动轮构成的支撑和运动机构,两个驱动轮由两台步进电机控制其运动方式。垃圾桶通过红外接收器来接收信号,通过接收电路来控制步进电机的正转、反转、加速、减速及停止等工况,从而实现垃圾桶定向运动。电机工况与垃圾桶运动姿态关系如表1所示。
表1 电机工况与垃圾桶运动姿态关系
左电机 | 右电机 | 运动姿态情况 |
反转 | 正转 | 原地逆时针旋转 |
正传 | 反转 | 原地顺时针移动 |
停止 | 正转 | 左转弯 |
正转 | 反转 | 右转弯 |
正转 | 正转 | 直线前进 |
反转 | 反转 | 直线后退 |
智能分类垃圾桶的运动控制路线如图4所示,微型处理器STM32F104控制电机的工况,从而控制了驱动轮的工况,配合万向轮运动时的高自由度,实现了智能分类垃圾桶的全方位移动。同时,位于移动底盘周围的超声波避障传感器,将检测到的信号反馈给微型处理器STM32F104进行判断和处理,从而进一步控制两个驱动步进电机工作,实现了智能分类垃圾桶智能化移动。
为了保证运动的可靠性和运动机构的使用寿命,万向轮及驱动轮的材料均选用ABS,充分利用ABS材料的耐磨性和耐冲击性,且相对于传统的材料而言,选择ABS材料也极大地降低了移动底盘的重量,提高了运动速度和运动的可控性。
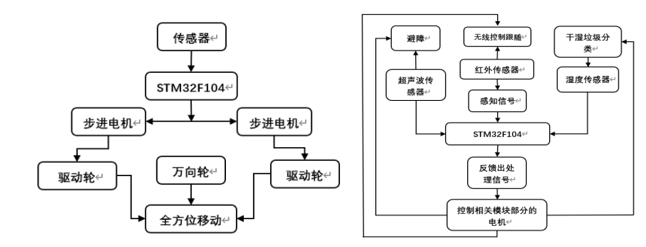
图4 垃圾桶运动控制示意图 图5 总体控制图
三、控制系统组成
1.总体控制系统
控制系统主要由单片机控制系统、传感器系统和电机驱动系统组成,如图5所示。单片机控制系统选择的是STM32F104型号,该单片机完全胜任本系统的计算和处理能力。运动系统主要通过单片机给出的多路PWM信号对两台步进电机实现实时驱动,从而控制了垃圾桶的运动姿态。传感器系统由超声波测距传感器、红外模块、湿度传感器等组成。各部分同时采用模块化设计,使得整体具备一定的拓展性,令后续进一步开发及维护变得简单方便。
2.超声波避障
超声波具有在同种媒质中以恒定的速率传播的特性,而且会在不同的媒质的界面上发生反射现象。根据此特性,可以令垃圾桶在移动过程中自动测量反射波与发射波发射的时间间隔,从而达到了测量移动过程中自动避障的作用。为了尽量减少在超声波测距过程中的盲区,在移动底盘安装了三对(一个发射探头和一个接收探头为一对)共六个传感探头,探头均匀地分布在移动地盘的周围,从而尽量减少垃圾桶在移动过程中的探测盲区。
四、电力系统设计
1.垃圾桶的充电系统
在墙壁上安装了微型充电站,可以向垃圾桶充电。垃圾桶通过移动底盘附带的左右两个红外接收装置判断充电口的位置,调整其姿态与充电口对接。对接后,智能垃圾桶停止工作,进入充电模式。其寻找充电信号源可能出现的结果如表2所示。
表2 电源提供动力方案
左红外接收器 | 右红外接收器 | 姿态状态 | 控制内容 |
有信号 | 有信号 | 底盘充电槽口与充电站口正对 | 直线后退接入充电站口,实现充电功能 |
有信号 | 无信号 | 移动地盘充电槽口偏右 | 左旋转,直到左右红外接收装置均检测到信号后直线后退 |
无信号 | 有信号 | 移动地盘充电槽口偏左 | 右旋转,直到左右红外接收装置均检测到信号后直线后退 |
无信号 | 无信号 | 完全偏离充电槽口 | 右旋转,直到左右红外接收装置均检测到信号后直线后退 |
2.单片机电力供应方案
根据单片机的特性可采取以下二个方案:(1)安装三节5号或7号电池,提供单片机工作所需电压3.3-5V;(2)使用12V电瓶进行供电,利用稳压芯片降压处理后提供单片机工作所需电压。其原理如图7所示。
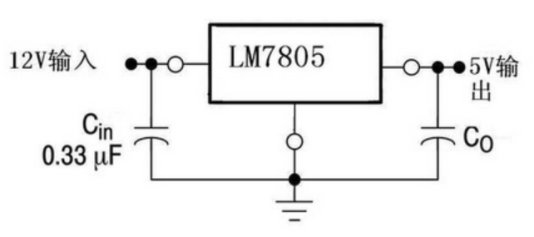
图6 供电原理图
五、结论
(1)设计了一种由单片机控制的智能垃圾桶,该垃圾桶通过传感器可以实现干、湿垃圾的自动分类存放;同时在传感器的作用下,该垃圾桶可以实现自主避障运送垃圾。(2)介绍了垃圾桶的整体结构,对垃圾分类系统、运动机构、电力系统的结构和工作原理进行了设计与分析。
参考文献:
[1]陈禹行,庄志凌,曾杰.我国垃圾分类现状与智能分类垃圾系统设计分析[J/OL].电子技术与软件工程,2019(23):99-102.
[2]郑龙海,袁祖强,殷晨波,陈曦,刘久晨.基于机器视觉的建筑垃圾自动分类系统研究[J/OL].机械工程与自动化,2019(06):16-18.
[3]唐渊,周汝,段武斌,刘臻.基于单片机控制的红外线与超声波混合避障智能小车[J].中国设备工程,2018(12):179-180.
[4]赵健衡.基于单片机控制的红外线遥控器设计[J].电脑知识与技术,2009,5(01):244-246.
[5]王立锦,于富强.单片机控制系统的红外线遥控器接口[J].电子技术,1998(10):36-38.
【作者简介】秦坤圆(2001-),男,河南商丘市人,佳木斯大学机械工程学院本科在读,主要研究方向:机械设计制造及其自动化。
【通讯作者】刘新柱(1975-),男,安徽濉溪县人,工程硕士学历,佳木斯大学机械工程学院副教授,主要研究方向:力学教学及相关教科研工作。

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网 琼ICP备2021005105号



