鞍山市奥鞍耐火材料有限公司 辽宁鞍山 114000
摘要:机械臂具有负载大、能耗低、体积小的特点,能够完成维修、对接、焊接、喷涂、搬运等作业,在机械制造设备领域得到广泛应用,使得生产线制造精度和制造效率大幅提升。机械臂是由多根杆件连接组成,通过连杆结构的操纵功能和移动基座的移动功能,使得机械臂具有很大的工作空间,但受摩擦、死区、饱和等因素影响,机械臂移动稳定性受到影响,因此,研究机械臂自动化控制方法,改善机械臂动态性能,提高机械臂对生产线环境的适应性,具有重要意义。
关键词:生产线;机械助力臂;自动化控制
引言
机器视觉技术以感光元件作为处理核心,运用光学传感器传输出的模拟信号,转换采集得到电信号与光信号。随着摄像头与成像处理技术的发展,机器视觉处理技术可处理的数据信息由二维向三维方向转换。在自动化机械生产模式影响下,工业机械臂成为支持现代化生产的重要设备,如何实现工业机械臂的自动控制过程也成为当下的研究热点。按照典型机器视觉数据采集、图像处理以及运动控制处理过程,从软硬件的角度出发,设计工业机械臂自动控制系统。
1机械臂概述
工业机器人手臂是利用人工智能模拟手动运动改变姿势从而加快生产的生物力学装置。因此,可用工业机器人手臂进行运输、焊接等,还允许一些劳动密集型行业使用的人工交互。一般来说,机器人手臂由五个自由度组成,用于空间定位,一个自由度用于支撑身体。
2自动控制系统硬件设计
2.1设计机械臂视觉伺服结构
将机械臂视觉伺服结构划分为视觉伺服组成和关节伺服组成。视觉伺服组成以工业相机作为图像采集设备,并控制工业相机内的图像同步传输至用于处理的计算机内;关节伺服组成将机械臂本体作为处理核心,在本体外部连接用于工作的步进电机以及机械臂控制器。
伺服结构内,采用DSP芯片作为机械臂关节内的驱动结构,配置型号为F28335的开发板,设置开发板的运行主频为150MHz,利用开发板内32位浮点调试驱动结构在上位机中的编译过程。准备型号为XDS510型号的仿真器,并连接输出的DSP总线。按照上述机械臂的驱动形式,选定2项混合式的步进电机作为动力支持,利用其内部生成的脉冲,固定PWM脉冲宽度,对连接的步进电机产生一个反向控制作用。当PWM脉冲产生不同视觉周期的变化量后,控制型号为TB6560的电机驱动器挡位调整到驱动四挡。联合机械臂控制器与步进电机的驱动器,按照实际的开关电机实际的开关组合方式,设置混合式步距角为2.2°。视觉伺服组成结构内,将准备的工业相机固定在机械臂的支撑台内,按照图像控制输出的视觉范围,输出机械臂产生的关节角度变量,传输至上位机中,用于算法处理目标数据。机械臂视觉伺服结构设计完毕后,选型控制系统主控件。
2.2人机交互方式分析
基于力/光学反馈的人机交互具有抗逆性,力传感器固定在机器人手臂末端,6维反馈是通过操作手柄通过V6维传感器捕获的末端作用力接触进行的实时反馈。机器人手臂关节的末端有一个双眼睛摄影机,实时显示作业的局部场景。运动类型的底部是一个垂直滚动装置,用于实时测量和显示运动类型的旋转和倾斜,从而使运动类型在末端具有精确的位置。激光雷达实时扫描,创建虚拟作业环境,提供路径规划所需的信息;关节位置通过关节传感器实时测量,实现机器人手臂位置的实时校正。无缝集成和基于虚拟信息和真实环境的本地三维可视化—全局可视化增强了机器人手臂的视觉交互,并改进了交互式智能和流程数据的智能显示。人的互动是由视觉互动、视觉互动和人的互动策略3组成的,从而实现了人与穷人之间智能高效的互动。
2.3系统主控件选型
以上述设计的视觉伺服结构反馈的信息作为主控件选型的参考信息,按照机械臂的运动特性,设计上下组合形式控制结构,将参与控制的上位机作为上位控制结构,选定型号为STM32F103控制芯片作为下位控制核心。控制芯片内核型号为32位的ARMCortex结构,控制I/O串口支持模拟通道,在串口SWD内向外部延伸两条连接线,配置内存大小为64KB的SRAM。将微控制器结构外部连接口处放置光电传感器,传感器采用外部延伸2个端口,A相端口连接用于分析的上位机,B相端口则用于控制硬件结构驱动。将电源电路、时钟电路以及复位电路作为硬件结构的驱动结构,驱动电路以上述选定控制芯片作为结构中心,连接微控制器内的预留开发接口。
主控结构内,为了消除机械臂与上位机之间由于通信距离过近,而导致的通信扰动问题。将上述主控结构看作为控制板,在芯片外部的I/O串口连接2个USART,控制1组负责仿真调节主控硬件各部分结构,另外1个负责连接上下位控制结构,实现硬件结构的导通。自动控制系统硬件结构设计完毕后,设计控制功能性软件。
3建立机械臂运动学模型
将机械臂视为杆件在空间内组成的连杆结构,建立机械臂运动学模型,描述机械臂位置姿态。将基座、主动臂、从动臂、末端视为杆件,共5根杆件和4个关节,分别描述一根杆件与两端关节、两根相邻杆件与中间关节的关系,当机械臂移动时,由基座关节角度确定4个关节处于的铅垂面,在铅垂面内分析正运动学,根据连杆结构几何关系和关节角度,解析机械臂正运动状态。设杆件i的长度为a,i∈(1,4),分别表示基座、主动臂、从动臂、末端,杆件i的距离为b
i、扭转角为ci、与相邻杆件之间的夹角为di,杆件i关节处的坐标系为OiXiYiZi,计算4个关节坐标系的原点函数O1、O2、O3、O4,公式为
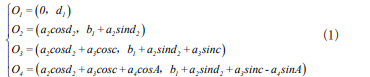
其中A为末端关节角度,大小为d4-c。由末端坐标系原点O4的纵坐标和横坐标,分别得到末端z轴坐标Bz,以及基座和末端最短距离C,根据机械臂在基座坐标系X1O1Z1平面的投影原理,可得末端x轴坐标Bx和y轴坐标By,表达式为:

由式(1)可知,原点O1、O2、O3、O4的函数变量都是关节角度di,根据关节角度变化范围,确定末端工作空间。当机械臂在生产线上作业时,在末端固定摄像头,定位作业目标位置,作为末端期望到达的位置(Bx,By,Bz)。把(Bx,By,Bz)作为已知值,由式(1)和式(2),求解4个关节角度di,通过4根杆件关节角度的控制,改变末端坐标(Bx,By,Bz),使机械臂垂直于二维平面的同时,在二维平面上运动,跟踪作业目标。至此完成机械臂运动学建模。
4机械臂抓取测试
参照机械臂支持上位机内的视觉捕捉平台,默认上述计算得到的初始位置参数为机械臂标定的零点状态,采用全局定位方式定义抓取坐标中心,并将该图像坐标中心作为机械臂的抓取目标点,准备12种不同体积大小、不同材质的抓取物体。将被抓取物体放置在规格为200mm×200mm的装箱内,采用机器视觉模块获取抓取物体的顶点坐标,并将该顶点坐标转换为机械臂坐标。在机器视觉范围内,标定物体的初始抓取位置以及目标位置后,引导机械臂产生抓取动作,成功抓取时的机器视觉变化。
结束语
随着工业社会的进步,工业机器人起着越来越重要的作用。当今工业变革的时代,劳动密集型和技术密集型行业必须实现生产自动化,提高生产力,提高生产质量。在这方面,将进一步扩大自动生产。工业自动化升级在不同行业引入不同类型的自动化生产线,以实现工业改造升级,提高生产力和生产质量。当前机器人臂的工业生产自动化仍处于儿童保护阶段,机器人臂在我国工业生产自动化中的应用仍然可见。随着机器人、人工智能、工业机器人自动化等专业理论和技术的发展,生产得到了合理化。
参考文献
[1]王小冬.基于力/位控制的机械臂纤维铺放技术研究[D].燕山大学,2019
[2]徐智颖.在轨装配空间机械臂振动特性分析及优化控制研究[D].燕山大学,2019
[3]吴巍.多机械臂协作系统的故障诊断与容错控制[D].郑州大学,2019.
[4]卜令正.基于深度强化学习的机械臂控制研究[D].中国矿业大学,2019.
[5]郑晓斌.基于模糊滑模变结构的工业机械臂控制系统研究[J].陕西理工大学学报(自然科学版),2019

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网 琼ICP备2021005105号



