青岛理工大学
关键词:基于WIFI控制的智能消毒小车是一个复杂而又庞大的系统,其控制核心是51单片机。用多种传感器来采集外部环境信息并将接收到的信息传给主控制器,然后由控制器来控制其各个模块执行相应的动作。基于WIFI控制的智能消毒小车的制造成本相对来说比较适中,在我们的日常生活中有着十分广泛的运用。
关键词:消毒小车;模块;运用研究
基于WIFI控制的智能消毒小车需要最基本的运动能力,即前进、后退、左 转、右转,底盘采用轮胎设计,适应大部分的地形。因为是远程操控,无法得知车辆运行环境,所以就需要一个摄像头来了解车辆所处的环境,而且需要实时显示摄 像头传输的画面,通过开发的 Android APP 实现小车的前、 后、左、右运动,履带车在APP发出控制指令后可以快速作出反应,同时摄像头拍摄的画面可以通过WiFi实时传输,并进行显示。
工作速度 | 0-25m/min |
轮距 | 400mm |
离地间隙 | 40mm |
转弯半径 | 35mm |
轮胎型号 | 橡胶塑料轮胎 |
电机型号 | DC3V-6V直流减速电机 |
重量 | 空载时3kg满载时5kg |
外形尺寸 | 长:300mm宽:250mm 高:150mm |
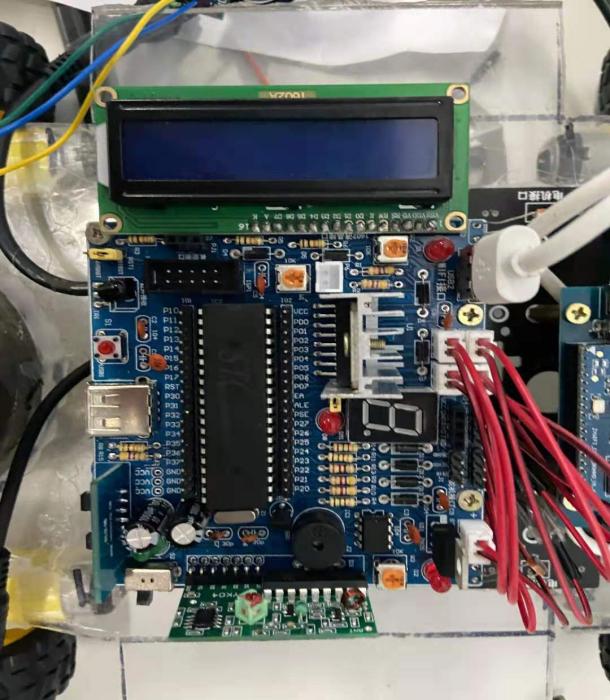
动力装置是智能消毒小车的动力来源与传动。51单片机为小车提供动力来源以及喷洒消毒液动力来源。如图:

本智能消毒车是基于WIFI控制的以51单片机为动力,先打开WiFi通过设计好的软件与小车进行连接,之后根据所处的环境与事先规划好的的目的地来进行思维绘图,通过设计的软件进行小车的遥控,51单片机的动力足够实现100-500米范围内的自由移动,对于整个房间的消毒可以实现无死角运转,而喷洒式嘴头也增加了消毒范围,而显示器也可以实时显示小车运行速度,以便在适当位置及时调整速度。
51系列优点之一是它从内部的硬件到软件有一套完整的按位操作系统,称作位处理器,或布尔处理器。它的处理对象不是字或字节而是位。它不光能对片内某些特殊功能寄存器的某位进行处理,如传送、置位、清零、测试等,还能进行位的逻辑运算,其功能十分完备,使用起来得心应手。虽然其他种类的单片机也具有位处理功能,但能进行位逻辑运算的实属少见。51系列在片内RAM区间还特别开辟了一个双重功能的地址区间,十六个字节,单元地址20H~2FH,它既可作字节处理,也可作位处理(作位处理时,合128个位,相应位地址为0OH~7FH),使用极为灵活。
51系列的另一个优点是乘法和除法指令,这给编程也带来了便利。八位除以八位的除法指令,商为八位,精度嫌不够,用得不多。而八位乘八位的乘法指令,其积为十六位,精度还是能满足要求的,用的较多。作乘法时,只需一条指令就行了,即 MuL AB(两个乘数分别在累加器A和寄存器B中。积的低位字节在累加器A中,高位字节在寄存器B中)。很多的八位单片机都不具备乘法功能,作乘法时还得编上一段子程序调用,十分不便。在51系列中,还有一条二进制一十进制调整指令DA,能将二进制变为BCD码,这对于十进制的计量十分方便。
智能履带小车需要最基本的运动能力,即前进、后退、左 转、右转,底盘采用履带设计,比起轮式小车可以适应更多的 地形。因为是远程操控,无法得知车辆运行环境,所以就需 要一个摄像头来了解车辆所处的环境,而且需要实时显示摄 像头传输的画面,通过开发的 Android APP 实现小车的前、 后、左、右运动,履带车在APP发出控制指令后可以快速作出 反应,同时摄像头拍摄的画面可以通过WiFi实时传输,并显示在APP的控制界面,有利于可视化操作。
智能消毒车主要硬件是以51单片机为基础的智能小车控制主板,这是整个智能小车的核心。其他硬件包括电源、定 位处理器、摄像头、WiFi数传模块、舵机和机械臂、电压显示器、直流减速电机。
智能消毒小车采用Android APP控制小车的运动。通过JDK,Android SDK,ADT和开发工具Eclipse构建APP开发平台,采用Java语言编写,编写完程序后,进入APP布局界面进行各按钮的布局,最后将APP打包,格式为.apk。将该APP下载安装到Android手机上即可使用。如图,为智能消毒小车APP配置界面,对智能消毒小车主体上搭载的路由器的IP、端口等信息进行配置的界面,当智能消毒小车的相关网络通信信息配置完毕后,即可进入智能消毒小车的可视化运行控制界面。
智能消毒小车通过开发的android APP实现小车 的前、后、左、右运动且操作灵敏度较高,智能消毒小车在APP发出控制指令后可以快速做出反应,同时 摄像头拍摄的画面可以通过 WiFi 实时传输,并显示在 APP 的控制界面,有利于可视化操作。
系统结构设计见图1,STC89C52RC是STC公司生产的一种低功耗、高性能CMOS 8位微控制器,有灵巧的8位CPU和系统可编程 Flash。其中电源模块采用AMS1117-3.3V,两节3.7V锂电池,为单片机和WIFI模块提供5V和3.3V,另外外扩4节3.7V的锂电池,产生 12V的直流电源。 为保证信息的匹配,可通过HC-05 AT指令修改BLUTOOTH 设备的波特率,保持与STC89C52RC一致。
智能消毒小车采用KEIL C语言软件开发系统,实现模拟串口初始化、串口中断通信、模拟串口通信、模拟串口中断溢出、智能车驱动等。
智能车直行时,四个电机方向相同,同时为正向;后退时,四个电机方向相同,同时为反相;45°左转时,左边一个轮子停止运动,右边两个轮子正向运动;45°右转时,右边一个轮子停止运动,左边两个轮子正向运动;90°左转时,左边两个轮子停止运动,右边两个轮子正向运动;90°右转时,右边两个轮子停止运动,左边两个轮子正向运动;360°左转时,左边两个轮子反相运动,右边两个轮子正向运动; 360°右转时,右边两个轮子反相运动,左边两个轮子正向运动。
模拟串口采用中断1,正常串口采用中断4,当WIFI控制智能车 时,蓝牙可以进行阻断和操作;当蓝牙操作时,WIFI无法改变小车运上输入参数,选择发电机AB相定子绕组发生两相短路故障。
(1)灵巧便携。智能消毒小车体积不大,因此能够达到便携。
(2)智能消毒小车安装WiFi,更便于连接。装有高清摄像头,能进行实时监测。
(3)能够在危险的地方进行消毒,且喷头为多方向喷雾式,灭菌效果大大提升。
(4)电池续航时间长,可以长时间工作。
(5)可进行远程操控,并且可以进入人力无法到达以及危险的地方进行消毒。
2

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网 琼ICP备2021005105号



