国网浙江省电力有限公司临海市供电公司,浙江 临海317000
摘要:接地刀闸在电力行业中应用十分广泛,为确保安全采取的接地措施。如果是接地刀闸本身老化或接地电阻出现质量问题,就根本无法确保实现安全有效可靠的现场接地与保护,必须严格依靠现场有相关经验能力的检验人员去进行现场的确认,因此无疑增加大量了检验人力成本费用和现场经验风险。是一个比较重大潜在的用电安全隐患,严重可能威胁使用者人身生命和电网设备供电安全,加强对接地刀闸开关的质量检测维护和维护管理措施尤为其重要。因此设计了一种基于激光测距技术的刀闸位置辅助确认系统。通过长期地对接地刀闸机械机构状态参数和空间位置特征等的广泛调查分析研究,选择设计开发生产了多套与其之对应和匹配的终端传感器,并同时进一步地结合了复合接口电路、低功耗器件模块等多种新型集成检测技术最终地完成地实现了对接地刀闸机械系统的动态空间位置特征的辅助确认识别系统设计。
关键词:接地刀闸;激光测距;传感器;系统研究
0 引言
为了提高接地刀闸使用的安全性,防止接地刀闸本身或接地出现问题,就无法实现有效的接地保护,造成人员现场检查时不必要人员安全事故,非常有需要对接地刀闸的智能位置确认系统进行研究。激光测距技术在位置辅助确认时具有重要的作用。原理是基于激光反射,脉冲激光测距依据电子控制技术与激光技术,目前激光测距仪已经在各领域广泛的应用,且精度也不断提高。本文分析了激光测距仪的工作原理,选择了合适的激光传感器,基于激光测距技术的接地刀闸位置辅助确认系统的研发,能借助激光测距来更有效地保障接地刀闸位置正确,操作安全,杜绝各种操作事故发展,避免带来损失和负面影响。
1.系统设计
1.1系统架构设计
根据隔离开关分合闸双确认判据要求,采用基于激光测距的技术路径,即基于激光测距传感技术的隔离开关位置双确认系统,该系统由激光测距传感器、通讯网关、上位机软件(选配)以及安装支架、防护罩等组成,系统网络架构如图1所示。

图 1 系统架构
1.2系统判断逻辑设计
基于激光测距传感技术的隔离开关位置双确认系统主要对隔离开关分闸、合闸的位置进行辅助判据,从工作逻辑上,可以分为主动和被动两种模式。(1)主动模式。设定好采样时间,传感器自动循环采集分合闸状态;(2)被动模式。将分合闸启动的信号源同步输送给激光传感器,激光传感器收到信号开始工作,测量分合闸位置信息。结合现场环境,本方案采用第二种“被动模式”逻辑判断。
2.基于激光测距技术的辅助确认系统研究
2.1激光测距原理方法[1]
激光测距主要类型是脉冲激光脉冲测距技术,测量一个目标时就是直接采用由脉冲激光器来首先直接向该测量目标方向上发射送出一个脉冲光束,再通过经向该测量目标方向的激光反射和接收光而可以直接地返回至激光测距仪,具体工作方式都是直接通过计算出脉冲激光束的脉冲发射时点与激回波束的脉冲的反射到接收的时刻两点间的时间差为t时来最终计算确定距离测量到目标的距离为D,即:
![]()

图 2 脉冲激光测距原理框图
脉冲激光测量系统一般均可归结为由脉冲激光发射单元、接收及测量输出单元、控制电路、计时用的基准块和脉冲振荡器、计数器块组成和数字显示信号输出的模块电路组成系统等这几个子部分系统共同组成。其系统整个的基本组成过程均可为:按扭下整机的复位电路按扭下按扭,复位模块电路即自动给出测量整机进行复位动作的信号输出以保证使对测量后整机能够进行快速复原,待被测量前整机完全机处于预先准备好的脉冲测量状态下之后,再通过重新触发接收到脉冲激光后的发射机,输出激光脉冲。如图2所示。
2.2激光测距传感器
2.2.1传感器选择
中国在当前使用的变电站结构产品中的接地刀闸对应的传感器型号差异还较多,因此我在这里本文是主要是针对中国在当前电力系统自动化设计系统中所普遍常用的到的接地刀闸,选择出一款具有对应结构类型特点的传感器型号来作为变电站自动监控诊断分析系统产品设计中的一个前端,结合隔离刀口开关结构、分合闸系统的运行的轨迹及移动物体的相对速度、工作的场所环境、接口类型精度要求范围等,根据其工作的距离及其大小和总刀闸宽度和分刀闸距离,分别采用VL6180X光学测距传感器和激光传感器HLM1235-650[2],相关参数如表1所示。
表 1 传感器参数
参数 | VL6180X 光学测距传感器 |
激光射线的波长 | 850 nm |
测试距离为 | 0~50 cm |
实测精度 | 0.1 cm |
光照强度 | 0.038~50 klux |
输出电压信号 | 0~5 V (16位电压输出) |
参数 | 激光传感器采用 HLM1235-650 |
输出波长 | 650 nm |
输出功率 | 3.5 mW |
输出电流 | 0~20 mA |
2.2.2传感器接口设计
刀闸操作和分合闸动作时:VL6180X输出电压波形范围为0~5 V的电压信号,HLM1235-650-3.5-3.2P输出电压波形范围为0~20 mA的电流信号。为了确保能够直接将以上所有这两种的输出接口信号全部都可以转化并输出转化为其他各种场合适用到的单片机能正常处理转换出来的全部输入及输出的信号,制作统一标准的单片机输出转换接口电路,如图第3所示。

图3 复合型接口
传感器接收到位置信息或者输入数据后,单片机将会读取随机测量产生电流信息输出或电压信号,然后将传感器输出通过单片机接口电路的处理电路使控制器将使之转换输出一个适应于该单片机要求测量的模数范围的转换位置信息或者输入,然后传感器再通过由该单片机控制器将对感测到收集到位置的转换输出信号的输入信号进行分析处理进行分析处理检测数据和分析处理进行诊断,最后该单片机会将检测分析处理结果信息数据回传或进行存储。刀闸分合状态辅助诊断装置将桥接口电路部分单独作为使用本套装置供电系统中电路的较重要的一部分,应由装置电源回路内部的锂离子电池模块负责供电。电池一方面作用是通过工作电源LDO为单片机接口器件和传感器电路部件提供一个额定的工作电压,另一方面它也就是通过一个基准电源为每个单片机接口电路部分都提供一个额定工作基准电压。接口电路主体部分图例如上图第4所示[3-4]。

图 4 传感器接口电路
图例4图中,K1和K2均为继电器上的一个常开接点,由单片机直接控制其输出线圈,用来构成切换电流输出和输出电压的输入控制信号回路的接口电路。
2.2.3供电及功耗设计
首先,激光测距传感器模块必须要正确选用VL6180X光学测距传感器模块(合闸判定)块和HLM1235-650-3.5-3.2P光电测距传感器块(分闸判定)传感器模块,单片机控制器主要芯片采用主控芯片MSP430F5系列,无线模块均是主要采用了ZigBee的无线语音传输模块来实现进行无线语音信息的收发。用以上的相关装置对传感器进行功耗进行简单估算计算。配置3200mAH时电的聚合物锂电池可持续大约两年。
2.3硬件外观设计
结合隔离开关工作场所环境,激光传感器外观设计要考虑雨雪天、雾天、阴霾天等天气环境以及强电流、电压等电磁场环境。因此在外观设计中,为了保障测量的精度,必须满足防护等级的要求。
(1)防护要求。激光测距传感器设计防护等级至少达到IP65等级要求,同时加装防护罩;
(2)施工安装要求。结合隔离开关工作场景,激光测距传感器考虑安装固定在支架上,与被检测对方采用非接触式安装;隔离开关工作场景在强电流、电压等电磁场环境中,考虑施工安全性和不影响变电站正常工作前提下,采用非停电安装;
(3)外观颜色要求。因安装位置在室外,因此颜色以醒目容易辨识色系为主;
(4)尺寸要求。激光测距传感器尺寸暂定为140 x 78 x 48 mm ,如图5所示:
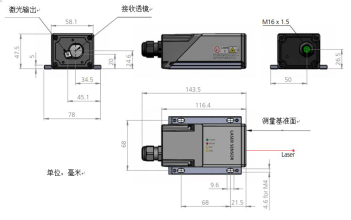
图5产品外观尺寸
2.4软硬件安装部署
(1)现场实施团队与技术专家组进行现场环境确认,确认现场生产环境服务器、网络环境是否已经具备,硬件安装环境要求是否已经具备,并根据现场情况及实施方案计划安排在此确定系统部署时间。
(2)现场实施团队与技术专家组协调相关部门落实现场网络、安装条件、定位精度、分合闸定位距离。
(3)系统部署完成后进行业务数据初始化工作。
(4)部署/升级完毕后整理《安装配置清单》、《系统安装部署手册》等文档。
3.结论
综上所述,此次应用激光测距定位技术实施的接地刀闸位置判断辅助确认系统产品的项目研发,首先已确定出了该系统架构的设计、判断的逻辑与设计目标内容,设计判断完毕确定后分析设计了系统接地刀闸刀口结构,选择了合适匹配的激光传感器结构并计算确定出了系统相关设计参数等;然后是为了更加方便的单片机进行控制,设计好了与传感器接入电路的接口电路,并同时为该系统专门设计出了性价比较高优的单片机前端的供电方案-运行电源方案,使得它也可以保证在单片机不带外挂接电源模块的情况下能长期工作,最后还依据接地刀闸的使用场景对硬件的外观进行了设计,并讨论了软硬件部署问题,达到了设计目标。在推动现代高速电力系统行业跨越式发展实践中,激光定位测距术更是以其它技术其本身的极具现代电力特色技术的特殊技术优势而迅速被提高应用到提升了激光定位的测量速度精确性实时性,解决掉了在传统的刀闸定位测量和分合定位过程中出现大量技术人力时间成本浪费风险和技术经验风险等问题,随着激光测距技术的进一步普及应用,在价格方面必然能进一步降低从而推动该项技术更深更广泛地应用,提升行业的整体竞争力。
参考文献
[1]刘坤,陈芳.激光测距方法及激光器的发展[J].科技信息,2008,(30):387-388.
[2]昂志敏,金海红,范之国.基于 ZigBee 的无线传感器网络节点的设计与通信实现[J].现代电子技术,2007,30(10):47-49.
[3]原羿,苏鸿根.基于ZigBee技术的无线网络应用研究[J].计算机应用与软件,2004(6):89-91.
[4]李莉,李海霞,刘卉.基于无线传感器网络的温室环境监测系统[J].农业机械学报,2009,40(s1):228-231.
[5]周海鸿,周嘉奉.基于ZigBee技术的温湿度监测系统[J].国外电子测量技术,2015(7):75-79.
[6]胡丹丹,鲍嘉明,宁可庆
.一种用于锂电池保护芯片的关键电路研究[J].电子设计工程,2018,26(23):190-193.
作者简介:
1、朱鸿博(1991-),男,工程师,从事电力系统分析、运行及继电保护管理工作,身份证号:331082199105060310
1、 杨梦琦(1994-)女,从事自动化方面的工作,身份证号:331082199307290085
2、丁虹引(1994-)女,从事自动化方面的工作,身份证号:331002199408052025
3、 王云逸(1997-)男,从事自动化方面的工作,身份证号:331082199702170016
4、陈由杰(1994-)男,从事自动化方面的工作,身份证号:331082199403051658
5、 陈煜(1992-)女,工程师,从事继电保护工作,身份证号:331082199211290320

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网 琼ICP备2021005105号



