太钢集团岚县矿业有限公司,山西吕梁 033500
摘要:利用声呐探测设备,发挥声波在水中传播的优势,精准探测采空区的赋存位置及形态等信息,通过后期数据处理形成剖面及3d模型,为后期的采空区处理及安全管控提供数据支撑。
关键词:声呐探测;充水采空区;数据处理;建模
0 引言
太钢袁家村铁矿位于山西省吕梁市岚县梁家庄乡,是一种典型的沉积变质型铁矿,矿区主要含铁岩组为上太古界吕梁山群袁家村组,矿体走向近SN~NNE,局部NE,倾向S~SE,倾角60~80º,为陡倾斜矿体。1958年经群众报矿,由山西省地质厅吕梁山地质队发现,截至1980年2月,经数次地质勘探后,确定的B+C+D级储量121866.3万吨,其中B+C级工业储量80036.9万吨,占总储量的65.7%。
由于储量集中,矿层连续性较好,受上世纪90年代铁矿石价格上升因素影响,90年代末到20世纪初,矿区内陆续开办了36家规模不等的矿山企业,主要开采矿区内的富矿与高品位磁铁矿,由于利益驱动和当时监管手段的缺乏,各家矿山企业越界开采,违规盗采,在太钢2007年整合各家小矿山企业时,虽然山西省第三地质工程勘查院对矿区内小矿山进行了实测并提交了实测成果《山西省岚县铁矿井下实测储量估算地质报告》,但经过后期生产实践,发现的采空区数量与规模都远远大于实测成果,为安全生产埋下了隐患。
1 背景
2012-2018年,袁家村铁矿采空区扫描使用的是英国MDL公司的C-ALS三维激光扫描系统,该设备直径46.5mm,扫描有效范围0-150m,扫描精度+/- 5cm,通过钻孔将设备伸入采空区空腔内通过接收激光探头发射的激光反射从而形成点云图,准确获知采空区的形态。2018年6月,当采空区勘查进行至采场1530水平时,出现了勘查孔充水现象,同时也陆续发现了数个充水异常孔,截至2019年10月,共计出现281个充水孔。由于激光的特性决定了原先的C-ALS三维激光扫描系统无法扫描此类充水采空区,因此,袁家村铁矿引入了声呐探测系统以解决充水采空区的扫描问题。
2 声呐探测原理
由于水中存在的溶解物质、悬浮体和各类有机体导致水的不均匀性,使得光波一是在水中遇到具有吸收能力的物体后光能转换成其他能量导致衰减严重,二是在光传播途径中遇到其他粒子导致发散使得激光扫描系统在水下采空区扫描时无法正常工作。
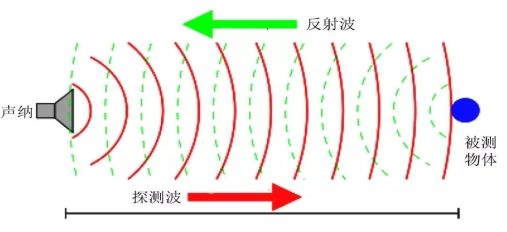
声纳由发射机、换能器、接收机、显示器、定时器、控制器等主要部件构成。发射机制造电信号,经过换能器把电信号变成声音信号向水中发射,声信号在水中传递时,如果遇到障碍目标就会被反射回来,反射回的声波被换能器接收,又变成电信号,经放大处理,显示在电脑上,同时根据接收的反射波的方向与时间差,能够得到障碍物的大致形态与距离,从而确定采空区的形态与位置。
 3 袁家村铁矿声呐探测系统
3 袁家村铁矿声呐探测系统
3.1 设备组成
探头:具备360゜旋转测量能力,具备可以抬升进行顶板底板测量的声呐传感器
 绞车:确保下放入孔
绞车:确保下放入孔
铠装电缆:数据传输与供电
地面控制与供电单元
起重三脚架和绝缘滑轮
图形处理器与数据处理软件
3.2 技术特点
3.2.1 设备内置
设备内置一对声呐发射和接收传感器、姿态稳定系统、陀螺仪&罗盘方位系统以及声速设定和压力平衡,可准确测量方位角、深度等信息。
3.2.2 环切式扫描
当钻孔为相对垂直的情况下,设备可以全部进入空区,通过不同的下放深度,测量不同深度的断面数据,获取空区边界信息,并调整声呐发射器的倾斜角度值来获取顶底板的数据,获得完整的空区信息。
3.2.3 定点式扫描
由于现场条件的限制,无法保证钻孔的垂直性,当钻孔倾斜度较大的时候,可以将声呐探头的前端伸入采空区,通过调整声呐发射器的倾斜角度来对采空区进行完整的测量。
4 声呐扫描操作过程
4.1 现场准备工作
踏勘测量场地情况,首先测试钻孔是否有堵塞,在钻孔破碎严重的部位下套管保护,然后选取提升绞车的固定的位置,接下来在钻孔上方支撑起重三脚架,连接设备;完成以上工作后,对设备进行初始化、校准方位角。
4.2 现场测量
设备下放时,起始下放速度为较缓慢的匀速,设备顺利通过破碎带岩层后,开始提速,当要到达空区的位置,将速度调缓,缓慢的将设备放入含水空区中。设备探测工作时,调整设备的深度,软件参数,对含水空区的边界探测,顶板探测,底板探测,直至探测完整的空区数据,保存数据。
5 数据处理及分析应用
由于声波传播的特性,当声波遇到障碍物时,部分发散的声波能够绕过障碍物继续向前传播,直至该部分声波遇到封死的岩壁产生折射返回被声呐接收,该部分声波就会造成对实际采空区形态判断的误导,因此,在声呐系统在进行工作时,要对该部分声波进行剔除。根据得到的全部信息,可以大致判断采空区形态,首先将游离于采空区主体外的部分飞点清除,该部分飞点的产生可能是由于设备本身的电躁或者声波在传播途中遇到极小的悬浮物产生反射,比较容易判断;其次针对大量的影响判断采空区形态的假点,需要对比假点密集程度与声呐发声功率的差异,同时结合现场的地质条件、地下采矿工艺方法、采空区顶板稳定性研究结论等综合判断,从而最后确定合理的采空区形态。
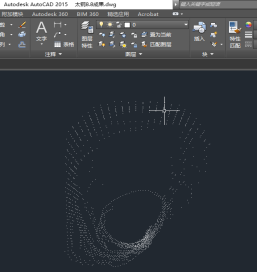
确定采空区形态后,将数据导出CAD格式,对数据进行验证,分析,判断,量取长度、跨度、高度;建立空区模型,对照实际的CAD图形位置信息;编写报告对空区信息做具体描述,对下一步空区处理、安全管控、后续探测等工作提出相应意见。
|
|
声呐系统形成CAD格式文件 | 声呐系统形成3dm格式文件 |
6 结语
声呐系统的应用,成功解决了袁家村铁矿充水采空区的探测难题,为后续的采空区处理及安全管控等方面提供了数据基础,消除了安全隐患,使现场作业能够在已知条件下进行,但同时,无效数据的剔除仍是声呐探测数据处理的难点,需要技术人员大量的工作积累以及相对简单的现场地质条件,在复杂条件下的数据处理仍需在专业人员的指导下方可进行。
参考文献:
[1]刘盛东,张平松.矿井声纳探测技术与应用[J].淮南工业学院院报,2001,03(21):5-6
[2]鱼京善,成二丽.侧扫声纳系统及其在海洋环境监测和保护中的应用[J].海洋测绘,2004,03(24):64-65
作者简介:
白旭晨(1987-12)男,工程师,大学本科,矿山地质与测量中级,主要从事采矿区技术研究工作。

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网 琼ICP备2021005105号