(中车太原机车车辆有限公司,山西 太原 030000)
摘要:缓冲性能是气缸比较重要的一项指标,本文主要通过研究活塞式气缸缓冲性能的原理,结合实际工况,将一定条件下的气缸行程时间作为气缸缓冲性能的评价指标,从而根据这一指标进行气缸试验设备的设计和应用。
关键词:气缸;缓冲性能
Abstract: Cushioning performance is an important indicator of cylinder performance. This article mainly studies the principle of piston type cylinder buffering performance.Based on the actual working conditions, The cylinder stroke time under certain conditions was used as an evaluation index for the buffering performance of the cylinder, and a cylinder testing equipment was designed based on this index.
Keywords: cylinder;buffering performance
0 引言
活塞式气缓冲气缸的驱动结构在压缩空气作用下做直线往复运动,由内置式缓冲结构进行缓冲性能的调节。如图1所示,活塞将气缸分为两个腔,分别为进气腔和出气腔。在柱塞和气缸端盖的密封圈相接触后,由于密封圈的密封作用,出气腔又被分为两个腔,分别为缓冲腔和出气腔。此时缓冲腔的气体只能通过缓冲针阀处的孔流出,由于节流的作用,缓冲腔的气体没法排出,对应的缓冲腔的压力急剧升高,形成比较大的制动力。在制动力的作用下,气缸的活塞速度下降,这样通过调节缓冲针阀开口的大小可以使气缸活塞达到最佳缓冲的目的。
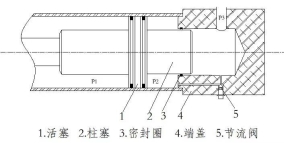
图1 活塞式气缓冲气缸结构示意图
1 气缸的缓冲性能
气缸在实际运用中主要通过调节节流阀,改变排气的速度来达到最佳缓冲的目的。一般气缸的缓冲效果的好坏主要通过气缸在行程末端的碰撞速度和缓冲过程中的加速度来判断,气缸运行过程中最理想的缓冲状态为气缸在行程末端最后时刻的速度刚好为零。
气缸的缓冲状态可以分为最佳缓冲、过缓冲和欠缓冲三种状态。
1.1 最佳缓冲
气缸的活塞无反弹的到达行程末端,并且到达行程终点时的速度很小,这样的缓冲状态就是最佳缓冲。在实际应用过程中,可以通过观察气缸活塞的运动状态,如果活塞运动过程比较平稳,到达行程末端时速度趋于停止,没有明显撞击和反弹,在实际调节过程中可以认为无撞击。
1.2 欠缓冲
在缓冲过程中,当气缸的缓冲针阀的开度比较大时,产生的背压腔的压力不能制动柱塞使它在到达行程终点的时候速度接近零,从而活塞以比较大的速度直接撞到气缸端盖上,产生比较大的震动和噪声,此时认为气缸处于欠缓冲状态,需要将节流阀开度调小。
1.3 过缓冲
在缓冲的过程中,当气缸的缓冲针阀的开度比较小时,背压腔内的压力急剧上升,对活塞的作用力非常大致使活塞在没有到达行程终点的时候速度已经变成零,当驱动力和摩擦力的和小于背压腔压力的作用力时,柱塞会产生反向速度,当驱动力和摩擦力的和大于缓冲压力的作用力时,随着背压腔压力的减小,活塞会出现走走停停的“爬行”现象。
1.4 判断缓冲性能的指标
实验中通常采用气缸的加速度、速度、位移等曲线作为分析和判断气缸缓冲性能的依据,但这些参数需要有相应的检测能力和试验设备,在专业气缸生产和检验领域应用较多。在一些精度要求不高的工况下,发现在气缸调节过程中,欠缓冲模式下,气缸运动时间较最佳缓冲的运动时间长,且由于阻力过大,容易导致行程不够的情况;在过缓冲模式下,气缸运动时间较最佳缓冲的运动时间短,且通过观察发现气缸运动整体速度较快,且在行程末端有明显冲击感。因此用气缸运动时间来表征气缸的缓冲性能,是一种高效、经济且实用的方式。基于以上分析,设计出基于气缸运动时间的一种活塞式气缸缓冲性能调节装置。
2 活塞式气缸缓冲性能调节装置的设计
2.1 整体方案设计
活塞式气缸缓冲性能调节装置结构简图如2图所示,由计算机、空压机、气缸、电磁控制模块、位移监测模块、计时模块、显示模块组成。计算机作为控制中枢,控制空压机输出压力、输出电磁控制模块的控制信号;空压机为气缸试验提供稳定气源;电磁控制模块由电磁阀、气路系统组成;位移监测模块采用微动开关,搭载计时显示装置,将计时信号返回显示屏。
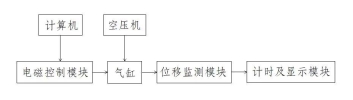
图2 气缸缓冲性能调节装置结构示意图
操作人员根据显示的数据,与气缸标准运动时间比较,对气缸的节流阀进行微调,经过多次微调后重复试验,最终完成气缸的缓冲性能调节。
2.2 电磁控制模块
直线往复运动式气缸有对称的两套气路,两套气路均配置了电磁阀,对应气路的电磁阀通过计算机控制送电,则进气口打开,压缩空气进入对应腔体,气缸完成一次运动过程。
2.3 位移监测模块
位移监测模块采用微动开关,根据气缸额定行程将一对微动开关安装在装置底板上,将位置标志块固定在气缸活塞杆,初始状态下标志块应与微动开关初始位置开关接触,当电磁控制模块给电后,气路打开,气缸活塞杆从初始状态离开,向行程终点运动,当到达行程终点后,活塞杆标志块与终止位置微动开关接触,微动开关电信号送至计时显示模块,并完成气缸活塞杆位移监测。
2.4 计时及显示模块
计时及显示模块采用CF5135C型数字计时面板表,外接位移微动开关作为计时触发信号。在气缸活塞杆开始运动时,活塞杆标志块与初始位置微动开关断开,触发计时功能,当标志块与行程终点微动开关接触时,计时功能结束,显示模块接收计时信号后,经过AD运算与显示程序,将气缸运动时间显示在屏幕上。
3 结语
气缸缓冲性能是气缸的重要性能指标,将气缸调节至最佳缓冲状态能够有效保证气缸的使用寿命,减少过缓冲造成的缓冲性能损伤及欠缓冲造成的行程不稳定等质量问题。本文通过分析气缸三种缓冲性能下的运动状态,结合实际生产运用场景,提出了将气缸运动时间作为反应缓冲性能的指标,并设计了一种基于气缸运动时间监测技术的缓冲性能调节装置。该装置经实际应用及验证,能够较好的完成气缸缓冲性能调节,且具有系统搭载难度低、投入产出率高、实用性强等特点,可以在活塞式气缓冲气缸调节领域推广使用。
参考文献:
[1]褚凌鹏. 气缸动力学与缓冲性能分析研究[D]. 西南交通大学, 2014.10-23.
[2]李铭,彭光正. 模糊PID控制算法在气缸位置伺服控制中的应用[J]. 机床与液压,2004(10):55-56.
[3]赵秀华,邹山,张玉芬.气动比例阀控系统死区特性及仿真研究[J].山东交通学院学报,2006,14(1):31-33.
[4]高永.CA2型气缸的缓冲特性及自调整缓冲结构研究[D]. 燕山大学, 2018:2-9.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网 琼ICP备2021005105号



