广元口腔医院 四川广元 628000
[关键词]:隐形矫治,透明矫治器,正畸生物力学,动态咬合
【中图分类号】 R 783. 5
[摘要]:无托槽隐形矫正器(Orthodontic invisable aligner )也叫透明牙套(clear aligner),是近代正畸史上又一伟大的发明,一种新型矫正技术的出现,必然要经历从构想到实验室的反复实验,产品雏形的研发,临床的不断实践应用,与基于传统固定矫正技术的正畸生物力学机制的融合探索过程,同时需要正畸医生的应用经验总结思考反馈与品牌材料的不断研发更替,并且逐渐走向成熟,或者是一个时代的引领者。本文主要从临床应用角度,通过查阅相关文献,对于该矫治技术的过去,现状,以及未来发展做一个系统的概述。
[ Abstract ] : Orthodontic invisable aligner, also known as clear aligner, is another great invention in the history of modern orthodontics. The emergence of a new type of correction technology must experience repeated experiments from conception to laboratory, product prototype development, clinical continuous practical application, and the integration and exploration of orthodontic biomechanics mechanism based on traditional fixed correction technology. At the same time, it is necessary for orthodontic doctors to summarize their application experience and think about the continuous development and replacement of brand materials, and gradually become mature. Or a leader of the times. This article mainly from the perspective of clinical application, through access to relevant literature, for the past, present situation and future development of the treatment technology to do a systematic overview.
1.1无托槽隐形矫治技术的诞生:
固定矫治器等传统的矫治装置常会影响美观,尤其是近年来成人患者逐步增加,对矫治器的美观和隐蔽性存在更大的需求。随着矫治技术、材料学、制作工艺、特别是计算机三维重建
技术的发展:早在1945年, Kesling首先报道了采用硬橡胶材料制作的正位器,此后, Sheridan引入了 Raintree essix技术,是在石膏模型上制作透明矫治器以矫正牙齿,这些可以视为无托槽矫治器的雏形,但这些技术矫治的适应症较窄,制作工艺较复杂,难以在临床中普及。[1]1997年,两名美国Stanford大学的学生Kelsey Wirth和Zia Chishti首先在美国硅谷创立了Align公司。事实上,创立该公司的想法最初还是来源于Chishti本人矫正牙齿的经历。Chishti曾接受过成人正畸治疗,与很多患者一样,他在治疗完成后没有很好地配合佩戴透明保持器而导致下颌牙列拥挤复发,只好又戴上透明压模式矫治器重新排列复发的下牙列。由于这类矫治器的矫治效率很低,Chishti感到很懊恼,但因此萌发了使用多个矫治器并结合计算机图像技术来有效移动牙齿的想法。基于Chishti这个富有创造性的想法,Chishti和Wirth,与2个正畸医生、1个计算机软件工程师共同在加州PaloAlto的车库中组建了Align公司,------Invisalign( Align公司,圣克拉拉,美国),这是口腔正畸领域近年来最重要的一个里程碑。[2]2003年首都医科大学口腔医学院清华大学机械工程系和北京时代天使生物科技有限公司联合开发研制了国产化的正畸无托槽隐形矫治器是有我国自主知识产权的国产无托槽隐形矫治系统,并获得国家发明专利和实用新型专利,在国内口腔正畸临床也得到不断推广和应用[3]。
1.2基础技术的支持:
近年出现的无托槽隐形矫治器(图1.1),是基于计算机辅助设计制作( CAD/CAM)技术而产生的,透明薄膜特性使其具有很好的隐蔽性,一定的弹性使其适于施加牙齿移动的矫治力和易于在口内就位,可摘性使其更利于口腔清洁和减少过大力所导致的牙齿创伤。另外,通过

图1-1戴有无托槽隐隐形矫正口内像, 作者2016年首例隐形矫正患者
牙齿的全包裹可以更好地使多个支抗牙连成整体以移动目标牙,能更好地实现支抗控制。
其制作的关键技术包括模型的数字化三维重建、光固化快速成型、热压模成形技术等。无托槽隐形矫治器带有活动矫治器的弊端,矫治器发展初期尚难以实现牙的三维向精确控制,常将其用于治疗难度较小的错合畸形的矫治,如用于轻、中度拥挤,少量牙间隙患者。不适于临床牙冠高度不足患者。拔牙患者和需调整颌间关系者疗效欠佳,难以实现牙齿转矩、整体移动、压入、伸长等精确移动,需大幅度牙齿移动者和疑难患者的预期更差。为了克服以上问题,各大公司开发了新型的膜片材料和附件,学者也尝试着通过结合固定矫治器的方案,逐步扩大了无托槽隐形矫治的范围。例如,Choi联合使用了微种植体和 Invisalign矫治器,矫治1例拔除4颗第一前磨牙患者,获得了良好的面容和咬合关系,mack将无托槽隐形矫治器成功用于正颌外科的患者。[1]
1.3无托糟隐形矫治器最初的优势
无托糟隐形矫治器美观、舒适、卫生,减少了医师的椅旁操作时间,治疗过程和结果可进行可视化预测,患者使用方便,就诊间隔时间可延长,因此有着显著的特色和明显的优势。可以预期的是,随着科技的发展和临床医师经验的丰富,无托槽隐形矫治技术的应用前景将更加广阔。
1.4临床应用:
.一般诊疗流程:先收集患者的ⅹ线片、面相和牙合像、取精确牙颌印模(硅橡胶印模法或者数字化扫描3shape ,I-tero等)资料,提交资料至厂家官方网站,医生进行正畸方案的设计,尽量采用定量术语(建议从矢状向,横向,垂直向,中线)描述给技师(拔牙、邻面去釉、推磨牙向远中等方案的确定、附件的设计等),厂家提供可视化治疗方案,医生修改,再将方案与患者沟通签署协议书。批准方案,厂家制作系列矫治器,临床正畸医生佩戴矫治器。
(2)对于临床病例的选择:隐形矫正最早可能用于固定矫正后轻微复发的患者,那么对于临床医生来说,怎么选择病例的适应症尤为重要。 隐形矫治的技术的临床效果是:患者+矫治器+医生的三要素的组合结果。“三分牙套,七分正畸”医生是一切的核心。无托槽隐形矫治器本质上是活动矫治器,对患者的依从性要求高。使用隐形矫治器时,要求医生明确诊断错合畸形,精确矫治方案,提高正畸技术,否则可能会出现后牙开牙合、后牙支抗丧失、后牙远移量不够等。[4]因此,使用无托槽隐形矫治器需严格把握适应证,具体如下。①低难度矫治病例:关闭前牙间隙(3 mm 以内),轻中度拥挤(6 mm以内),轻中度的切牙扭转,牙性反牙合等。②中等难度的矫治病例:关闭前牙 5 mm 以内、后牙 3 mm 以内的间隙;3mm 以内的前牙唇舌向移动;2 mm以内的磨牙近远中移动,磨牙的远中竖直;尖牙和前磨牙扭转 < 15°;颌间牵引;前牙轻度开牙合等。③高难度的矫治病例:切牙严重扭转;前磨牙及尖牙扭转 > 15°;颌间牵引;拔牙设计中拔除前磨牙而拔牙间隙需要磨牙前移≧3mm的量来关闭等。[4]隐形矫治技术的适应症随着该技术的不断发展越来越广泛,但是对比较复杂的骨性错合畸形完全用其来治疗仍然有一定的困难。[5]
2.生物力学特性:
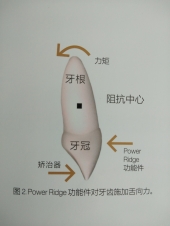
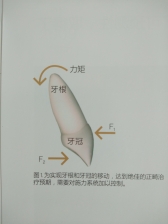 正畸中不同矫治技术的生物力学本质都是牙周组织及牙槽骨对施加矫治力的反应。常规固定矫治技术的矫治力集中在牙冠的临床中心处,是一个集中力系,通过弓丝的形变力作用在托槽上并传递给牙齿。而隐形矫治器没有弓丝与托槽,矫治器包裹牙面,这使隐形矫治器的矫治力系统较复杂。隐形矫治技术是利用膜片的弹性形变产生的回弹力对牙齿施力,每步矫治器均有一定的形变量,矫治器紧贴牙面,其施加的力量是一个分散力系,可以对牙冠的任何部位施力。因此,矫治器的矫治力和力偶取决于牙冠的解剖形态、牙齿类型、牙齿需要的位移量,以及牙齿与矫治器内表面的接触等[7]。力的传递特性与矫治器材料的性质有关[7]。不同厚度材料制作的无托槽隐形矫治器对牙齿的施力效果不同,厚 材 料 比 薄 材 料 的 力 量 大[8]。张 宁 等[9] 对 0. 5、0. 75、1. 0 mm厚度的热压膜材料进行研究,认为从力学角度和舒适性上考虑 0. 75 mm 的热压膜材料更适用于临床。隐形矫治技术的另一个力学特点是附件的使用。传统的固定矫治器体系是在牙冠上黏结标准化的托槽,通过置于托槽中弓丝形变产生的力量使牙齿发生移动。无托槽隐形矫治系统也是遵循这种设计模式,其中隐形矫治器类似于弓丝,而附件相当于托槽,隐形矫治体系是由不同样式的附件来发挥作用的。隐形矫治器的附件辅助矫治力施加于牙齿,成为控制牙齿移动不可缺少的装置。附件主要包括加强固位型、协助移动型和辅助功能型,都是传导力的装置。但是,附件的形状、位置、弹性模量不同时,力的方向、力矩也会有所不同。基于矫治器的设计原理,附件的使用大大提高了矫治效能[10]。以Invisalign隐适美系统的工作原理为例,Invisalign隐适美矫治器使用矫治力驱动系统创建,所形成的形状可以将特定矫治力施加个牙冠,实现预期的牙齿移动。力矩与矫治力之比称为力矩-矫治力比率(M/F),用于控制牙齿旋转的中心。应用一系列M/F值,可实现不同类型的牙齿移动。SmarTrack材料与SmartForce功能件和SmartStage技术巧妙结合,让牙齿移动更可预测。施力系统可测量。Invisalign矫治器所采用的设计使其可以精确控制施力系统,进而精确控制牙齿移动。Invisalign矫治器通过很好地控制M/F比率,从而提高对牙根相对于牙冠的移动的控制效果。SmartForce功能件通过对牙根和牙冠的优化控制能够治疗更为复杂的病例。
正畸中不同矫治技术的生物力学本质都是牙周组织及牙槽骨对施加矫治力的反应。常规固定矫治技术的矫治力集中在牙冠的临床中心处,是一个集中力系,通过弓丝的形变力作用在托槽上并传递给牙齿。而隐形矫治器没有弓丝与托槽,矫治器包裹牙面,这使隐形矫治器的矫治力系统较复杂。隐形矫治技术是利用膜片的弹性形变产生的回弹力对牙齿施力,每步矫治器均有一定的形变量,矫治器紧贴牙面,其施加的力量是一个分散力系,可以对牙冠的任何部位施力。因此,矫治器的矫治力和力偶取决于牙冠的解剖形态、牙齿类型、牙齿需要的位移量,以及牙齿与矫治器内表面的接触等[7]。力的传递特性与矫治器材料的性质有关[7]。不同厚度材料制作的无托槽隐形矫治器对牙齿的施力效果不同,厚 材 料 比 薄 材 料 的 力 量 大[8]。张 宁 等[9] 对 0. 5、0. 75、1. 0 mm厚度的热压膜材料进行研究,认为从力学角度和舒适性上考虑 0. 75 mm 的热压膜材料更适用于临床。隐形矫治技术的另一个力学特点是附件的使用。传统的固定矫治器体系是在牙冠上黏结标准化的托槽,通过置于托槽中弓丝形变产生的力量使牙齿发生移动。无托槽隐形矫治系统也是遵循这种设计模式,其中隐形矫治器类似于弓丝,而附件相当于托槽,隐形矫治体系是由不同样式的附件来发挥作用的。隐形矫治器的附件辅助矫治力施加于牙齿,成为控制牙齿移动不可缺少的装置。附件主要包括加强固位型、协助移动型和辅助功能型,都是传导力的装置。但是,附件的形状、位置、弹性模量不同时,力的方向、力矩也会有所不同。基于矫治器的设计原理,附件的使用大大提高了矫治效能[10]。以Invisalign隐适美系统的工作原理为例,Invisalign隐适美矫治器使用矫治力驱动系统创建,所形成的形状可以将特定矫治力施加个牙冠,实现预期的牙齿移动。力矩与矫治力之比称为力矩-矫治力比率(M/F),用于控制牙齿旋转的中心。应用一系列M/F值,可实现不同类型的牙齿移动。SmarTrack材料与SmartForce功能件和SmartStage技术巧妙结合,让牙齿移动更可预测。施力系统可测量。Invisalign矫治器所采用的设计使其可以精确控制施力系统,进而精确控制牙齿移动。Invisalign矫治器通过很好地控制M/F比率,从而提高对牙根相对于牙冠的移动的控制效果。SmartForce功能件通过对牙根和牙冠的优化控制能够治疗更为复杂的病例。
SmarTrack材料专为invisalign隐适美系统设计,可提供轻柔,更加持久的矫治力,从而提高临床可预测性和患者的舒适度。SmartStage技术是一种先进的算法,用于确定牙齿移动的最佳路线以及每一治疗步骤矫治器的形状。
目前隐形矫治在简单非拔牙病例中相对于固定矫正更加可控精准。对于临界拔牙病例,推磨牙向后的应用,有两点是与传统正畸理论相悖的。第一,传统正畸理论一般认为,垂直生长型的高角病例是不适合推上颌磨牙向后的。因为推上颌磨牙向后常会导致支点后移,容易发生下颌的后下旋转,前牙可能会出现覆变小,甚至开合出现,对于相貌后缩,颏部发育不良的Ⅱ类高角患者,可能会是灾难性的。不过,对于无托槽隐形矫治技术来说,隐形矫治因为牙齿面有材料覆盖,同时又是长期戴用,其实是可以很好地控制垂直向高度。目前的观点是高角病例也可以推上颌磨牙向后。有研究[11]表明,隐适美矫治系统使用Ⅱ类牵引配合可以使上颌磨牙整体远移,没有倾斜和明显的垂直向伸长,不会导致合面高的变化。第二,传统正畸理论几乎不会考虑推下颌磨牙向后的选项,主要的原因是下颌骨质致密,难以获得有效的支抗力系统,除非配合种植体支抗。临床实践表明,无托槽隐形矫治系统,如隐适美矫治系统推下颌磨牙非常有效,无需使用种植钉,就可以提供空间内收下前牙,改正反合成为治疗Ⅲ类错合畸形的强有力“武器”。文献复习和临床实践都支持这样一种观点,即:隐适美矫治系统的推磨牙向后是一类实现率较高的牙移动,据报道[12]设计的远移量的88%可以在临床实践中实现。[13]那么对于拔牙病例而言,矢状向上强支抗的控制比中度支抗相对容易,对于非骨性畸形的拔牙病例,隐形矫治的舒适度及患者满意度优于固定矫治。在垂直方向的控制方面,后牙垂直向压低相对容易实现,前牙的压低风险相对较大,尤其是跟骨关系差的患者,术前CBCT的判断尤其重要,同时仍然存在表达效率与设计上的客观差距,例如设计前牙压低的时候,正畸医生需要考虑过矫正设计,这个因素是多维度的思考,比如矫治器的品牌效率,患者根骨关系,患者年龄骨代谢情况。在对于复杂病例的治疗,作为正畸医生还是首选给患者推荐固定正畸治疗。另外根吸收是正畸医生在临床中无法回避的问题。隐形矫治器与传统矫治器相比,虽然其技术优势明显,但根吸收仍不能避免。隐形矫治器属于个性化订制式可摘矫治器,矫治中的根吸收与传统矫治中的根吸收不尽相同。目前,隐形矫治器品牌众多,其材料组成和力学性能均有差异。透明矫治器组ARR(牙根吸收)发生率( 56.30 % )明显低于固定器组( 82.11 % ) ( P < 0.001 )。透明矫治器组ARR(牙根吸收)平均值( 0.13±0.47mm ) 其严重程度明显小于固定矫治器组平均值( 1.12±1.34mm ) ( P < 0.001 )。[14]以隐适美为代表的无托槽隐形矫治仍不能避免根吸收,但根吸收的发生率及严重程度均降低;轻力、间歇力和疗程短是无托槽隐形矫治中根吸收量减少和发生率降低的原因;牙根与骨皮质的位置关系为根吸收的潜在因素(正畸后牙根靠近腭侧骨皮质比靠近唇侧骨皮质的根吸收发生率高)。[15]
4.1矫治器材料性能的研发:需要整合临床治疗反馈的大数据,科学考量根据地区人种情况设计符合该人群的生物力学矫治反应的矫治器材料。根据文献[16]研究,3D打印的透明牙科矫治器平均相对牙高差为2.55 %,与热成型矫治器( 4.41 % )相比其几何精度更高。所有观察员对这两类矫治器的齿高测量均有较低的标准差为( 0.03 - 0.09毫米)。3D打印的矫治器在2.93 mm的低位移下可承受662 N的最大载荷;而热成型矫治器在2.93 mm位移下仅能承受105 N的载荷。热成型的矫治器发生了较大位移的弹性形变和不可逆变形;而3D打印矫治器发生了较小位移的弹性变形,具有可逆性。目前,采用不同类型的热塑性材料,通过热成型工艺制备透明矫治器。热成型过程改变了材料的性能,口内环境进一步改变了透明矫治器的性能,影响了材料的整体性能。直接3D打印提供创造了具有软边的高精度透明矫治器,整套矫治器治疗进行了数字化设计和可重复生产;正在提供更好的适应性,更高的疗效和重复生产性。尽管3D打印得已知好处及其牙科应用的普及,但关于直接打印矫治器的文献中,技术和临床资料非常有限。这是一个整体更稳定的方法来生产一个亚毫米级的移动可以对治疗结果产生不同的影响。直接3D打印代表了一种控制矫治器厚度的复杂方法,因此具有更好控制使牙齿移动的矢向力的能力。目前市场上没有其他批准的材料可以做到这一点。[17]期望未来有更多的研究来测试这些新技术和新材料。根据牙齿的不同移动方式,不同牙齿部位,采取不同厚度或者不同材料性能的3D打印材料通过3D打印而组合成一个全新的个性化的矫治器。
4.2牙齿移动数字化设计个性化:对于牙齿数字化正畸移动所涉及的生物力学机制还需要进一步深入的研究。例如,Roberto Savignano等采用2例患者的牙列锥形束CT ( CBCT )及光学扫描获得的2个全套牙列。随后,对每颗牙齿采用了510个不同的力系统进行了有限元分析,以评价牙齿的转动中心。对CROT的中心位置进行分析,发现M:F效应与施加力矩的空间平面、受力方向和牙齿形态有关。每个平面上的牙齿维度被数学的用来推导它们对牙齿移动的影响。[18]Torkan Gholamalizadeh等对多位患者的下颌牙的旋转中心轨迹的有限元模型分析研究结果表明:对于不同患者和牙齿的CRot位置,如果采用相同的载荷条件,可以获取相似的模式。CRot轨迹在对应的牙齿中遵循类似的模式,但力和力偶方向的任何变化都会导致CRot轨迹的偏移,被视为围绕牙齿长轴的旋转。[19]只有对透明牙套的生物力学机制进行深入的研究之后,才能实行更加科学的个性化牙齿移动设计,此外还应该考虑患者的口腔环境,牙周情况,根骨位置关系,设计不同的牙齿移动最佳路径及速度。
4.3咬合关系的转移:目前所有隐形矫正所加入的初期咬合关系是静态的牙列咬合位置,从颞颌关节及牙合学角度讲是不合理的。以往的正畸诊断方法偏重于静态的模型和 X 光分析,而缺乏对咬合因素引起的口颌功能直观的检测和分析,故而不利于形成对口颌系统处于适应、代偿或失代偿的判断,也不利于做出有利于口颌系统健康的正畸和咬合修复的计划。根据问题列表设计的相对柔和缓慢的正畸有助于关节减压的生理性功能牙合的初步建立。也有助于利用种植,修复进行咬合重建。[20]
结语:隐形矫治系统作为一种新的数字化矫正技术,也必然是国家数字化产业技术层面下的口腔医学中的数字化正畸治疗的一个主流方向。未来随着3D技术和新的材料的不断研发,整合人工智能基于临床治疗大数据的软件系统,矫治系统会不断改进并且日臻完善。矫正前的全面科学的诊断,适应证的把握,隐形方案设计、复诊监控,医生是整个矫治过程的掌舵者。
参考文献:
[1]樊明文,丁云,林久祥等。2015口腔医学新进展,人民卫生出版社,2015:351-353
[2]白玉兴, 王邦康。无托槽隐形矫治技术———口腔正畸的机遇与挑战
-------华西口腔医学杂志 第 25 卷 第 6 期 2007 年 12 月 :521-524
[3]白玉兴, 周洁珉, 王邦康, 等. 国产无托槽隐形正畸矫治系统的开发与研制
[J]. 北京口腔医学, 2004, 12( 2):89- 92, 96.
[4]陈丹鹏. 隐形矫治器的适应症[J]. 中国实用口腔科杂志,2013,6(11): 655 - 660.
[5]韩海丽、卫晓霞、徐笑梅 .无托槽隐形矫治技术的研究现状及发展前景
HENAN MEDICAL RESEARCH Aug. 2019,Vol. 28,No. 15
[7]HAHN W,ZAPF A,DATHE H,et al. Torquing an upper center in-
cisior with aligners - acting forces and biomerchanical principles[J].
Eur J Orthod,2010,32(6): 607 - 613.
[8]HAHNW,DATHE H,FRICKE J,et al. Influence of the Rmoplastic
appliance thickness on the magnitude of force delivered to a maxillary
central incisor during tipping[J]. Am J Orthod Dent - ofacial Or-
thop,2009,136(1): 121 - 127.
[9]张宁,白玉兴,张昆亚,等. 不同厚度热压膜材料厚度稳定性的研究。[J]. 华西口腔医学杂志,2010,28(1): 99 - 101.
[10] 韩磊,赵丹,季骏. 应用 4 种光固化纳米树脂黏结无托槽隐形矫治器附件的临床对比研究[J]. 口腔医学研究,2018,34 (7):784 - 787.
[11]Ravera S, Castroflorio T, Garino F, et al. Maxillary molar distalization with aligners in adult patients: a multicenter retrospective study[J]. Prog Orthod,2016, 17: 12.
[12]Rossini G, Parrini S, Castroflorio T, et al. Efficacy of clear aligners in controlling orthodontic tooth move- ment: a systematic review [J]. Angle Orthod, 2015,sep;85(5): 881-889.
[13]赖文莉.·专家笔谈----一无托槽隐形矫治技术推磨牙向后的临床应用策略
国际口腔医学杂志 . 2019.7 , 46(4): 373-382
[14]Yuan Li1,Shiyong Deng1,Li Mei2,Zhengzheng Li1,Xinyun Zhang1,Chao Yang3,Yu Li4Prevalence and severity of apical root resorption during orthodontic treatment with clear aligners and fixed appliances: a cone beam computed tomography study.Prog Orthod2020 Jan 6;21(1):1.
[15]夏露露, 华先明,无托槽隐形矫治中的根吸收,口腔医学研究2019年12月第35卷第12期,1115-1118
[16]Prashant Jindal1,Mamta Juneja1,Francesco Luke Siena2,pya Bajaj1,Philip Breedon3
Mechanical and geometric properties of thermoformed and 3D printed clear dental aligners.Am J Orthod Dentofacial Orthop2019 Nov;156(5):694-701.PMID:31677678
[17]Gianluca M Tartaglia12,Andrea Mapelli1,Cinzia Maspero12,Tommaso Santaniello3,Marco Serafin12,Marco Farronato12,Alberto Caprioglio12
Direct 3D Printing of Clear Orthodontic Aligners: Current State and Future Possibilities.
Materials (Basel)2021 Apr 5;14(7):1799.PMID:33916462
[18]Roberto Savignano,Rodrigo F Viecilli,Udochukwu Oyoyo
Three-dimensional nonlinear prediction of tooth movement from the force system and root morphology
Angle Orthod2020 Nov 1;90(6):811-822.PMID:33378522
[19]Torkan Gholamalizadeh12,Sune Darkner1,Peter Lempel Søndergaard2,Kenny Erleben1
A multi-patient analysis of the center of rotation trajectories using finite element models of the human mandible
PLoS One2021 Nov 15;16(11):e0259794.PMID:34780529
[20]王 琪,综合动态咬合功能的正畸诊断和治疗 中国医学科学院 北京协和医学院 北京协和医院2016中国国际正畸大会暨第十五次全国口腔正畸学术会议,China Academic Journal Electronic Publishing House ,P549

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网 琼ICP备2021005105号