1.陕西航空产业发展集团有限公司, 陕西 西安 710032
2.陕西大秦无人机技术应用有限公司, 陕西 西安 710000
摘要: 随着无人机技术的快速发展,无人机在军事、商业和科研等领域的应用日益广泛。对于小型滑跑无人机,其安全回收问题也日益凸显,尤其是在紧急情况下的拦阻和回收。本文提出了一种适用于小型滑跑无人机拦阻系统方案,旨在确保无人机在各种情况下能够安全、有效地被拦截和回收。该系统由制动装置、紧急制动装置和紧急制动网三部分组成,能够在规定距离内使无人机安全停车。同时,对方案的具体使用方式提出了一种地面验证手段。
关键词:无人机;拦阻系统;技术方案;地面验证
0引言
无人机在执行任务时可能面临紧急情况,如系统故障、操作失误或恶劣天气,这要求无人机具备可靠的拦阻和回收能力。传统的回收方式往往依赖于无人机的自主滑降停车,但在某些情况下,这可能无法保证无人机的安全。因此,开发一种高效的无人机拦阻系统显得尤为重要。
1无人机拦阻系统功能及原理
无人机拦阻系统的主要功能为利用地面拦截系统回收滑翔无人机,并能使无人机在规定距离内安全停车。拦阻系统主要由拦阻器(包括力矩调节机构、摩擦片、制动带收放机构和壳体)、拦阻索组件、紧急制动装置及紧急制动网组成,拦阻器组件通过地钉固定在跑道两侧,并通过拦阻索组件相互连接。系统布置见图1。

图1 无人机拦阻系统方案图
系统工作原理为,当无人机着陆拦阻时,无人机身上的拦阻钩与拦阻索啮合,带动拦阻带从绕线转盘上退出,使拦阻带回缩机构和摩擦制动盘转动,制动盘和制动卡钳之间的相对运动产生的摩擦力将通过拦阻索施加到无人机上,使无人机减速直到停止。当拦阻器失效或者无人机着陆未能成功咬合拦阻器时,方案还提供了紧急制动滑块及紧急制动网作为方案的备份保障,使无人机能够安全实现拦停。
2系统结构
2.1拦阻器
拦阻器总成是整个拦阻系统的核心部件。其功能是通过制动索提供制动力,以满足无人机制动恢复的最大过载极限要求。拦阻器总成按结构主要由拦阻器外壳、手柄、中心轴、穿孔通风制动盘、制动带收放机构、制动钳、制动钳活塞、地锚等组成。
2.1.1 拦阻器外壳
拦阻器外壳的主要结构材料为不锈钢。壳体上盖体开有两个孔,便于卡钳活塞和中心轴的使用和维护。壳体周围总共设计了4个地锚,用于安装地钉。在壳柄的一侧设有制动带导向孔,使制动带能从中进出制动装置,当制动带高速拉出时,应保护制动带不受磨损。将制动带拧入制动装置时,应将制动带拉直并清洗干净。
2.1.2 拦阻带收放机构
拦阻带收放机构的作用是使拦阻带整齐地缠绕在缠绕转盘上,保证拦阻带能顺利拉出和收回,并有足够的强度使无人机在拦阻恢复过程中的制动力通过拦阻带顺利传递到拦阻绳上。
2.1.3 能量吸收系统
能量吸收系统的作用是将无人机动的能量转化为其他形式并进行耗散。制动装置采用摩擦盘能量吸收系统。摩擦片的能量吸收系统利用轴向压力压缩摩擦片和摩擦片的摩擦面,实现制动。中心轴不弯曲,结构紧凑,磨损均匀,制动性能稳定,制动力矩与旋转方向无关,易于制成三防封闭式。该系统采用夹板,便于拆卸、维护和散热。固定卡钳盘吸能系统的方案是通过调整卡钳活塞的压缩力,为制动卡钳提供稳定的制动压力,使制动摩擦片与制动盘之间的摩擦产生制动力矩;通过调节卡钳活塞的压缩力来控制制动力矩,以满足不同重量和速度的无人机的制动恢复。
2.1.4 拦阻索组件
拦阻索组件由制动索、支撑橡胶盘和制动索端环组成。拦阻索组件的两端通过其端环与拦阻器组件连接,并布置在跑道上。
2.2紧急制动装置
紧急制动装置的作用是在正常的制动钩和拉索发生故障后,使无人机停止运行,以防止无人机冲出跑道。紧急制动装置由拦阻索组件和多个紧急制动块(见图1)组成。当无人机以一定的速度通过制动钩挂上拦阻索,然后无人机通过拦阻索带动紧急制动块与其一起向前移动,最后无人机通过紧急制动装置与地面的摩擦实现能量耗散,最终停止。
2.3紧急制动网装置
紧急制动网装置的作用是在无人机的制动钩和缆绳发生故障后,用制动网对无人机进行制动和拦截,防止无人机冲出跑道。紧急制动网装置由制动网、支撑杆和阻力块组成。紧急制动网采用开放式网状结构形式,网宽0.4m,网身采用尼龙绳编织而成。当无人机以一定的速度撞向制动网并被其包裹,然后无人机随着制动网向前移动,最终无人机在阻力块与地面产生的摩擦力作用下停止使用。
3使用方法
无人机拦阻系统通过三道拦阻布置在长500m的飞机跑道上。拦截装置前方有一个300米长的无人机滑行区。该距离用于确保无人机在拦截前停止螺旋桨所需的时间。第一道拦阻装置设置在无人机滑行区后方,用于拦截和回收无人机。第二紧急制动装置设置在第一制动装置后50米处,用于在无人机制动钩挂不住第一制动索后,使无人机停止并回收。第三个紧急制动装置或紧急制动网装置应设置在第二个制动装置后50米处,以确保党前两个制动装置发生故障后无人机的拦停。
4拦阻系统的使用参数地面验证
无人机着陆拦阻系统理论上适用于一定起飞重量区间的各型滑跑无人机,但由于各型无人机起飞重量及着陆速度的差异,导致不同无人机的具体拦阻工况存在差异,因此需要通过计算及试验验证的方法确定无人机着陆拦阻系统的具体使用参数。本文着重介绍拦阻器的参数验证方法。
4.1地面验证原理
无人机拦阻的基本原理为能量耗散的过程,具有动能的无人机通过与拦阻索及拦阻装置咬合后,将无人机的动能传递给拦阻器,通过拦阻器内部卡钳与制动盘之间的摩擦,将动能转化为热能耗散,并最终实现无人机的拦停。因此需通过地面模拟无人机不同工况下的着陆动能E=![]() ,来探索拦阻器能量吸收系统中卡钳应当施加的制动力矩,从而确定有效拦停距离是否满足使用需求。
,来探索拦阻器能量吸收系统中卡钳应当施加的制动力矩,从而确定有效拦停距离是否满足使用需求。
4.2试验方法
使用地面模拟车对无人机进行等效模拟,地面模拟车通过牵引索与拦阻索相连模拟无人机与拦阻索咬合的状态,系统布置见图2。
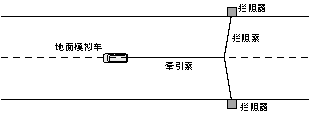
图2 无人机拦阻系统地面验证系统布置图
在已知机型着陆工况及着陆距离的前提条件下,使用地面模拟车并调整车辆速度来等效着陆时无人机的动能,通过调整拦阻器的摩擦力矩来对模拟车辆实现有效拦停,从而摸索无人机初始动能、拦阻系统摩擦力矩、有效拦停距离之间的使用条件。
5结语
本文介绍了一种小型无人机着陆拦阻系统的方案设计,介绍了拦阻系统的组成及工作原理,同时给出了着陆拦阻系统地面验证的方法,通过该方法能够有效指导滑跑型无人机的回收方案设计,并为无人机拦阻系统的实际工程应用提供理论依据。
参考文献:
[1] 杜聪聪,李武军,陈朝浪,马明旭.固定翼无人机回收与发射系统发展综述[J]. 科技传播,2016(07).
[2] 喻敏敏.舰载机阻拦系统分析及仿真研究[D]. 哈尔滨工程大学,2010.
[3] 褚永康.无人机撞网回收系统设计与分析[D]. 湖南大学,2011.
[4] 吴娟,符芳涌,肖勇.重型飞机拦阻系统的仿真分析[J]. 系统仿真学报,2009(20)
[5] 曹浩楠,黄建峰,安城辉,杨鹤猛,谢璐.固定翼无人机发射与回收技术发展综述[J]. 科技创新导报,2017(31).

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网 琼ICP备2021005105号



