(梅特勒-托利多(常州)测量技术有限公司 江苏常州,213000)
摘要:随着计算机处理图像技术的不断发展,越来越多的场合在应用图像识别和处理技术。例如:车牌识别、人脸识别、机器人、汽车安全驾驶等。本文针对当下图像处理技术应用在工业场合中,在指定的区域内通过工业相机找到200L桶的桶盖或桶口的坐标位置,然后把坐标通过通讯反馈给PLC(可编程逻辑控制器),PLC根据坐标,控制X-Y轴上的装置移动指定的坐标位置,然后再进行后续的操作。此技术意义深远,尤其是在特种场合,针对机械式寻找桶盖或通口都是通过接触实物然后在运动中定位,这样很容易引起碰撞火花或者是静电,存在安全隐患。
关键词:图像处理桶口桶盖识别图像分割 图像取圆 坐标转换
一、引言
数字图像处理技术起源于20世纪20年代,并从20世纪80年代开始广泛应用于工业、医疗、航天航空等诸多领域。图像处理技术通过工业相机获取图像信息,并应用软件程序自动处理图像信息,为工业生产快速集成提供了方便。随着图像处理技术的成熟和发展,其应用范围更加广泛,包括高级数控机床和机器人,图像处理技术提高了工业生产的自动化程度、让不适合人作业的危险工作通过图像处理技术的辅助下顺利进行,让大批量、高速度、持续生产变成现实,大大提高了工业生产效率和工业产品的精度,节省了人力成本。
二、原理分析
2.1 图像处理技术相关概念
精度prec:一般指图像中能区分的最小的物料长度大小,也即是单像素所成像对应的物体的实际尺寸大小,一般以毫米为单位。
CCD相关参数:CCD像素个数L,其中L为CCD排列方向上的像素数量,指CCD的实际物理尺寸。CCD像素尺寸d是CCD的最小成像单元(或者说是像素)的实际物理尺寸,微米级(um)。
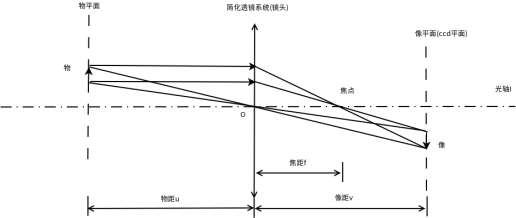
在理论简化过程中,我们将成像系统简化为“物平面+透镜+像平面(CCD平面)的形式”示意图如图(1)所示:
图(1)
光心O:可以简单的理解位透镜中心。
光轴I:过广信且垂直于透镜平面的假想直线。
焦点:光轴上到光心距离位焦距f的点。
物距u:物平面上一点到透镜平面的垂直距离。
像距v:像平面上一点到透镜平面的垂直Ulike
放大倍率M:物平面上单位长度的线段缩成像的实际物理长度,根据前面精度的定义可知,放大倍率应近似等于CCD像素尺寸d与精度prec的比值,即:
![]()
2.2 在成像系统中遵循以下原则
过光心O的入射光线经透镜折射后方向不变,平行与光轴的入射光线经透镜折射后出射光线过焦点。物距u与像距v和焦距f之间满足以下等式:
![]()
根据以上概念和定力,结合示意图,利用相似三角形之间边长相似的关系,物距、像距和放大倍率之间存在如下关系:
![]()
带入上式可知:
![]()
因此我们得到了精度、CCD像素尺寸、相机焦距与物距之间的关系:
![]()
这一关系对方案中的镜头参数和选择起到了关键的作用。
2.3 在实际应用场合中的概念
视场宽度D:一般指能够正常成像的物体和长度,在理论上有:
![]()
桶口/桶盖可包含的像素数n:对于一定的精度prec和桶口直径R,桶口/桶盖可包含的像素数有如下估算公式:
![]()
三、 需求分析
在指定的区域内通过相机寻找的桶口/桶盖的中心坐标,然后通过通讯发送的PLC中,PLC根据接收到的坐标数据,驱动X-Y移动到指定的坐标位置。基于以上需求,分别从硬件结构和软件算法两方面进行系统设计,用以满足应用需求。
3.1 硬件结构
本系统所采用的硬件包括:镜头、相机、光源、计算机、执行设备。如下图的图(2)所示:

图(2)
考虑到成本等因素,我们采用单相机进行图像采集,由计算机程序进行后期的图像信息提取。根据图(2)的参数我们可以确定镜头和相机选型。
3.1.1 镜头
景深:由于物距变化不大(桶的高度变化不大),一般镜头可以满足需求。
焦距:根据系统需求,物距u范围是2200~2400mm,假设我们选取的物距u为2200mm,选用的CCD像素尺寸位4.65um,焦距为6mm,根据公式:
![]()
可知精度约为1.7mm,桶口直径为50mm,当精度为1.7mm时,根据公式:
![]()
这也就意味着桶口/桶盖可包含的像素为:679个,可以满足图像识别需求。
3.1.2CCD相机
分辨率:视场范围宽度D为900mm,根据公式:
![]()
假设使用单相机,则理论上要求CCD相机长度L分辨率为529像素以上,所以CCD相机分辨率满足要求。
相机帧率:由于桶进入工作区时一般有一定的间隔,相机帧率条件一般较为容易满足。
所以硬件设计采用的相机分辨率为200/230万像素,像素精度为1~2mm。

3.2 软件算法
软件算法包括图像预处理、图像分割、圆心位置计算三个部分。
3.2.1 图像预处理
为了通过图像处理进行检测,对于单纯通过工业相机拍摄所得到的图像,由于受光源种类或工件的材质、颜色、环境等因数的影响,需要对图像进行预处理。 采用图像滤波去噪声是我们比较常用的办法。通过预处理,可使图像更加清洗、突出符合用途的具体要素(形状、颜色等),并消除干扰源,本课题中我们采用的是高斯滤波的方式。
高斯滤波是一种线性平滑滤波,适用于消除高斯噪声,广泛应用于图像处理的减噪过程。简单的说,高斯滤波是对整幅图像进行加权平均的过程,每一个像素点值都由其本身和领域内的其它像素值经过加权平均后得到的。高斯滤波的具体操作是:用一个模板(或称卷积、掩膜)扫描图像的每一像素,用模板确定的领域内像素的加权平均弧度值替代模板中心像素点的值。高斯滤波用于得到信噪比高的图像,反映了真实信号。高斯平滑滤波器对于抑制正态分布的噪声非常有效。
3.2.2 图像分割
对于图像中桶口和桶盖位置的分割问题,采用三种方法:自适应阈值(adaptive Threshold);HSV颜色空间转换;采用无参数的圆提取算法(EDCircles)。
在实际的使用过程中,这几种方法可能都会用到,几种方法之间可以相互补充,也可以相互比对,以下是各种方法的效果:
1) 自适应阈值
如下图(3)所示为自适应阈值边缘提取之后的图像分割效果;右图为用分割图像,通过函数将轮廓信息进去提取,计算每个轮廓的最小包络圆,通过一定的限制条件提取可能的圆形,图(3)可见该方法对银色和白色以及反光较大的图像提取效果不太理想。

图(3)
2) HSV颜色空间转换
如图(4)所示为图像的HSV分解结果,先将图像有RGB转为HSV空间,而后可以得到H、S、V三个通道分别的图像。

图(4)
接下来我们尝试通过H通道的数据对蓝色的桶进行分割,分割的结果如下图(5)所示,接下来我们还是用同样的函数将轮廓信息进去提取,计算每个轮廓的最小包络圆,基本上可以找到蓝色有桶的桶盖位置了,



图(5)
3) EDCircles
EDCircles算法是一种新形式的无参数圆提取算法,运行效果如下图(6)所示。


图(6)
3.2.3 桶盖/桶口圆心坐标提取
通过Hough圆提取、基于形状匹配或基于边缘的鲁棒性圆提取算法等操作,皆可得到桶盖/桶口的位置,经过计算得到圆心位置坐标。
如图(7)所示,Ow -xw yw zw为世界坐标系,Om -xm ym zm为测量坐标系,Oc -xc yc zc为相机坐标系,O n-xn yn为图像坐标系,O p-xp yp为图像实际的像素坐标系。πc为图像平面,πw为标定平面,πm为测量平面,πw平面和πm平面平行,且距离位L,Om 在Ow-xw yw zw 中的坐标为![]() 。n O 为光轴与c 的交点,称为主点。设πm上任意点Pm 的测量坐标为
。n O 为光轴与c 的交点,称为主点。设πm上任意点Pm 的测量坐标为![]() ,其中zm =0,摄像机坐标为
,其中zm =0,摄像机坐标为![]() ,对应的在πw上点Pw 的世
,对应的在πw上点Pw 的世
界坐标为![]() ,其中zw=0。Pw和Pm在πc上的理想投影点p 的理想图像坐标
,其中zw=0。Pw和Pm在πc上的理想投影点p 的理想图像坐标
为( x n,y n ),畸变图像坐标为(x d ,y d ),实际像素坐标为(x p ,y p )。定义On xn// O cx c,On yn //Oc yc和Oc zc⊥πc。则有


图(7)

其中fx, fy为 x、y 方向上的有效焦距,(u0, v0)为主点坐标,k1, k2为镜头径向畸变系数。I为单位正交旋转矩阵,![]() 为3x3正交旋转矩阵,
为3x3正交旋转矩阵,![]() 为3x1平移矢量。
为3x1平移矢量。![]() 和
和![]() 表示了
表示了
Ow -xw yw zw到Oc -xc yc zc的变换。
上述公式中完整地描述了相机的投影模型,这样我们可以得到测量平面上任意点与理想平面的变换关系为:![]() 。其中ρ为不等于0的比例因子,
。其中ρ为不等于0的比例因子,![]() 和
和![]() 分别为理想图像坐标的齐次坐标和二维测量坐标的齐次坐标;H为测量平面与理想图像平面的变换矩阵。
分别为理想图像坐标的齐次坐标和二维测量坐标的齐次坐标;H为测量平面与理想图像平面的变换矩阵。
假设h1和h2分别为矩阵H的前两列,则满足约束条件如下:

如果相机及测量系统经过标定,则fx, fy,(u0, v0),k1, k2和矩阵H已知,因此由图像处理得到的测量平面上特征点的像素坐标,由上面的公式计算得到的特征点畸变图像坐标,根据校准畸变后跌倒的理想图像坐标和数学模型,计算得到特征点的二维测量坐标。
四、 结论
本文提出的图像分析和处理的技术非常成熟,以及硬件也比较可靠,用在工业场合非常合适。实践证明文中提出的方法达到了预期的设计目标。
参考文献
[1]张毓晋.图像工程[M].3版.北京:清华大学出版社,2012
[2]杨高科.图像处理、分析与机器视觉:基于LabVIEW[M].北京:清华大学出版社,2018
[3]田浩.数字图像处理-原理与应用(译)[M].北京:清华大学出版社,2007
[4]朱伟.赵春光.欧乐庆.OpenCV图像处理编程实例[M].北京:电子工业出版社,2016
[5]刘增龙.赵心杰.机器视觉从入门到提高[M].北京:机械工业出版社,2021
[6]左飞.万晋森.刘航.Visual C++数字图像处理开发入门与编程实践.北京:电子工业出版社,2008
[7]张广军.机器视觉[M].北京:科学出版社,2005
1 / 8

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网 琼ICP备2021005105号



